First off - I have both units working when connected to send Connections over TCP - All good.
Problem is trying to make it work over Radio.
*One is base - Transmitting on Radio Corrections on Radio.
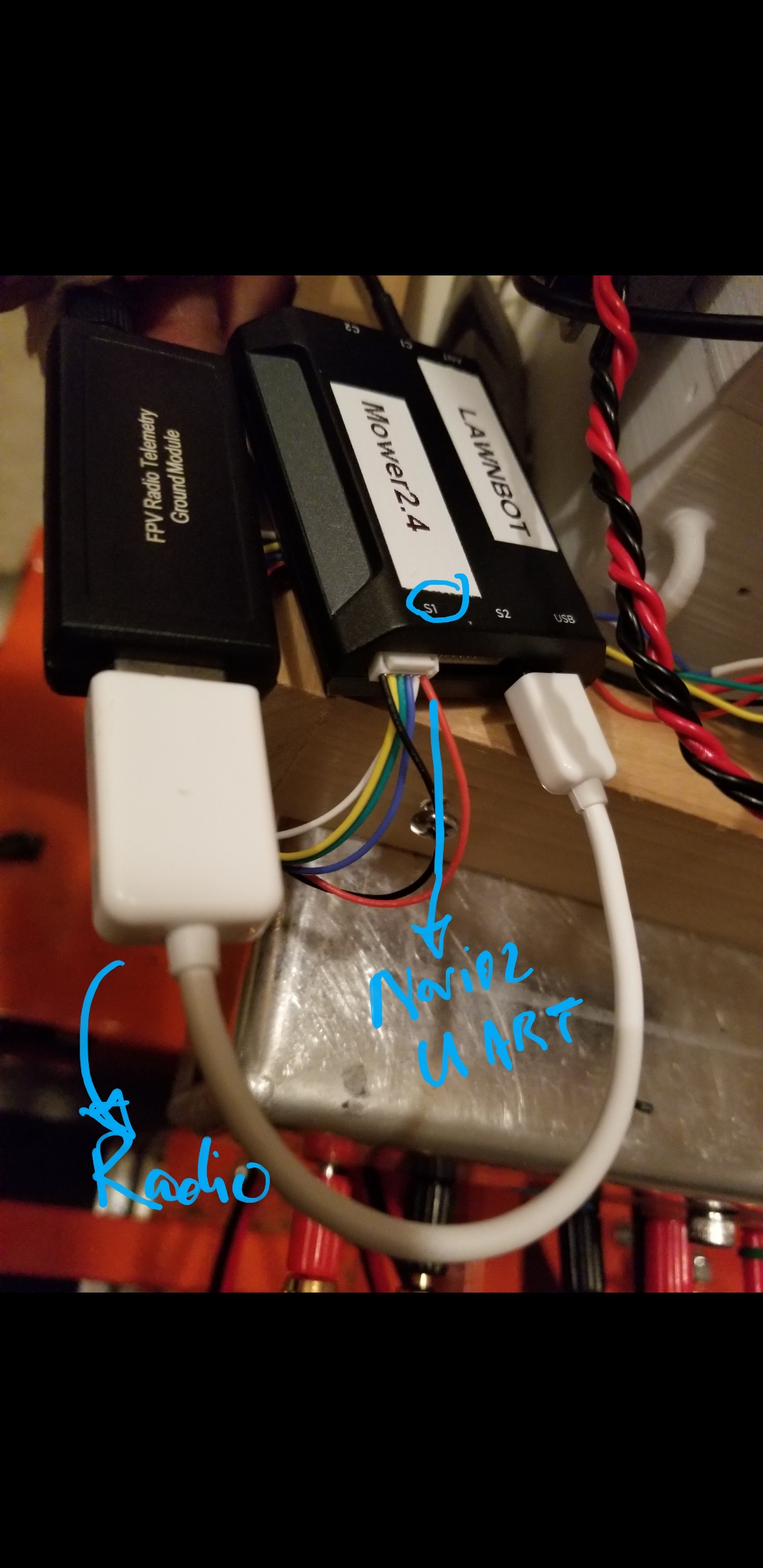
*Second one is attached to Rover like below
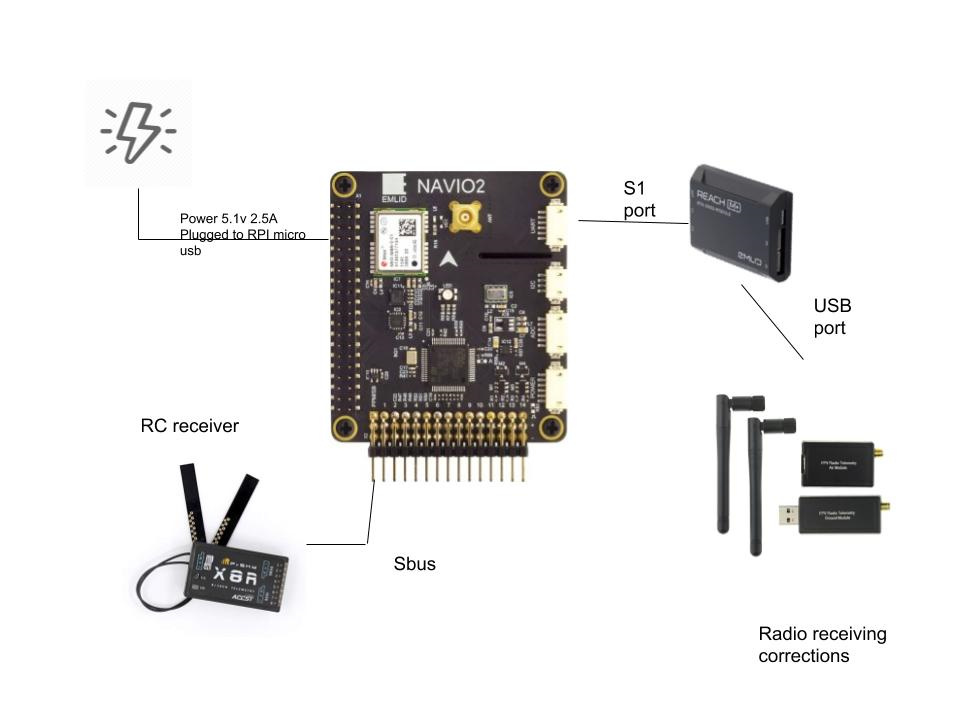
Reach m+ - S1 port → Navio2 UART (is this correct? )
USB port → USB-OTG → Connected to radio have a standard telemetry radio for recieving corrections.
Thanks you , am configured and all set. My current issue is that i have a high degree of interference on raspberry pis from the Reach M+ unit . is there any way to disable Wifi completely after setup on the reach M+ ? maybe thru usb or other mechanism ?
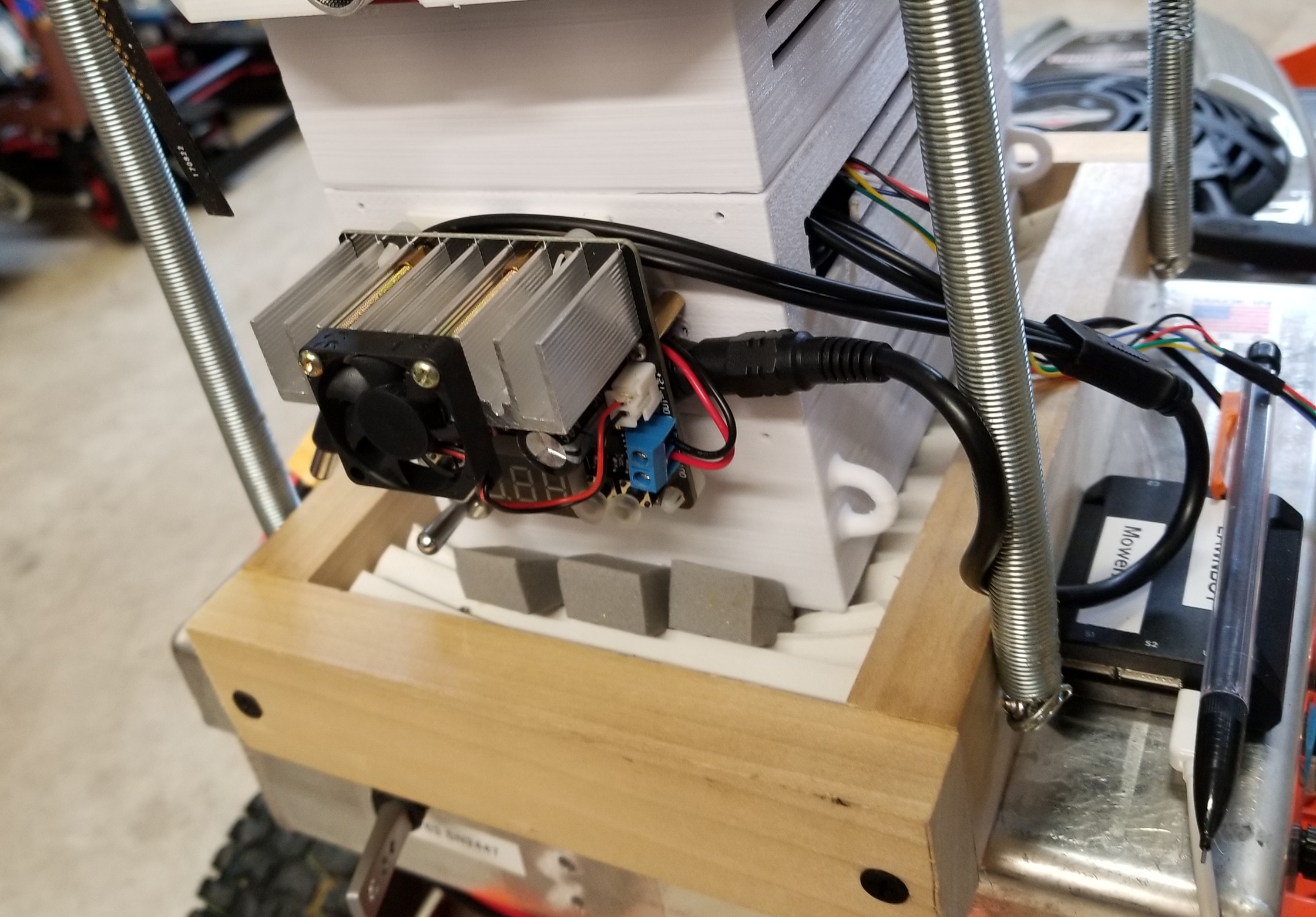
Below is my setup , Will be trying to shield it with EM shielding cloth, but would still like to know how to disable WIFI/reenable. I also know its going to increase the heat generated on Reach M+ once you wrap with shielding cloth, which is already warm to the touch (and summer here can reach upto 100F with humidity.
Hoping you can help with this. I’ve started doing all kinds of EMI shielding and still saw no difference in what was happening.
But one symptom is clear the loss of data only happens when ReachM+ is connected to Navio2. If I unplug ReachM+ from UART Navio2 is very stable.
Second Symptom Navio2 is reading RC input channel and publishing them on /mavros/rc/in node @10hz, connecting the ReachM+ you start seeing pauses in the rc channel published data ex: rostopic echo /mavros/rc/in
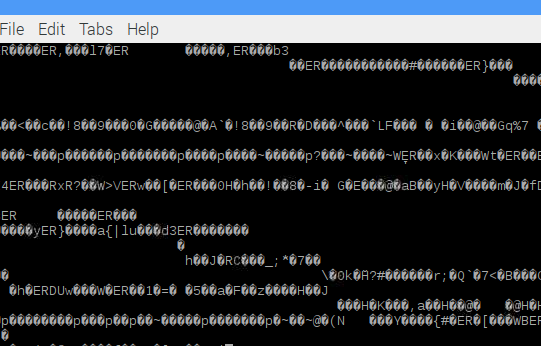
What i now think is happening - Navio2 is choking on the serial data input @baud rate of (38400 , however if you see screenshot it shows 115200 - FCU GPS1 - ublox) from ReachM+ (or) suffering degradation of serial reads (or) having cpu cycle contention problems with sampling rc input (sbus) at same time. I also saw below error when the fcu completely stopped responding.
At this point the entire RPI also stop responding (WIFI networking)
Only thing connected to RPI is Power and Ethernet.
One another question the telemetry link between the radios what baud should this be set to ? currently gave it @57600, should this match to 38400 (which is whats set between reach m+ and navio2)?
May I ask you to describe more precisely how Reach influences to RPi?
Once ardurover initlializes with ReachM+ enabled.
* Responsiveness of the RPI over wifi or physical networking decreases over a matter of minutes.
after few mins it completely stops responding, now only option to power cycle Navio2/RPI.
Data being published from ardupilot starts sputtering or become intermittent, with pauses. After sometime I see the heartbeat failure (screenshot above) from FCU and the whole rpi stops responding.
Have you tried to connect Reach without radio? If the issue persists?
Yes same problem i unhooked telem radio and the degradation happens same way. I also noticed the RC channel messages being published starts dropping as this starts happening in a matter of a minute(brief pauses start happening) after ardupilot comes up.
(Just Navio2 without ReachM+ connected is very stable)
After a couple of days of pulling hair finally fixed it. Seems simple now.
The correction data coming from ReachM+ on the serial port has characters that mean something to the kernel and sysrq when serial login console shells are enabled on the RPI.
Hopefully this helps folks running into similar problem






{kind=link}