I would like to receive some help about some parameters of MP.
My first configuration with M+ is MP injecting RTK corrections into telemetry, with a base passing corrections to PC via TCP. Mission Planner shows a good satcount in this case, gives “rtk float” message for the gps and “gps status” = 5. However, checking the reachview app, the M+ doesn’t find the base position and all the points rapresented on the map are red which means no corrections. Is this fine with my configuration?
My second configuration passes corrections from base to rover via LoRa radio. In this case in the reachview app, M+ finds base position and shows green points which means fix correction. However in the MP I have a gps status = 3 and a “3D gps” message. Is this all right?
In your first setup, Reach M+ doesn’t receive base corrections. We need more information about your settings in Mission Planner and Reach M+.
Could you please send us screenshots with MP settings (GPS_TYPE, GPS_INJECT_TO, GPS_AUTO_SWITCH)? SERIAL4_BAUD should be the same as chosen in ReachView position output. Also, a screenshot of Mission Planner main page would be great.
In regards to your second configuration, could you please provide a screenshot of the screen with a GPS status message? How many satellites does it show?
I’m not in the office right now so I can’t post you screenshots, sorry for that.
For the first question I followed exactly parameters written in the integration guide. So GPS_TYPE = 1, GPS_INJECT_TO = 1, GPS_AUTO_SWITCH = 1. Regarding the BAUD I tried both 38400 and 57600 changing every time all parameters together. In all these cases I always get gpsstatus2 = 5 with RTK float correction but in Reachview page I’m not able to see these corrections coming.
For the second question I see more or less 11-14 satellites. From the Reachview app I can see at least float corrections but from MP the best I get is a gpsstatus2=3 and a 3D gps fix.
Hi @gleb.gira,
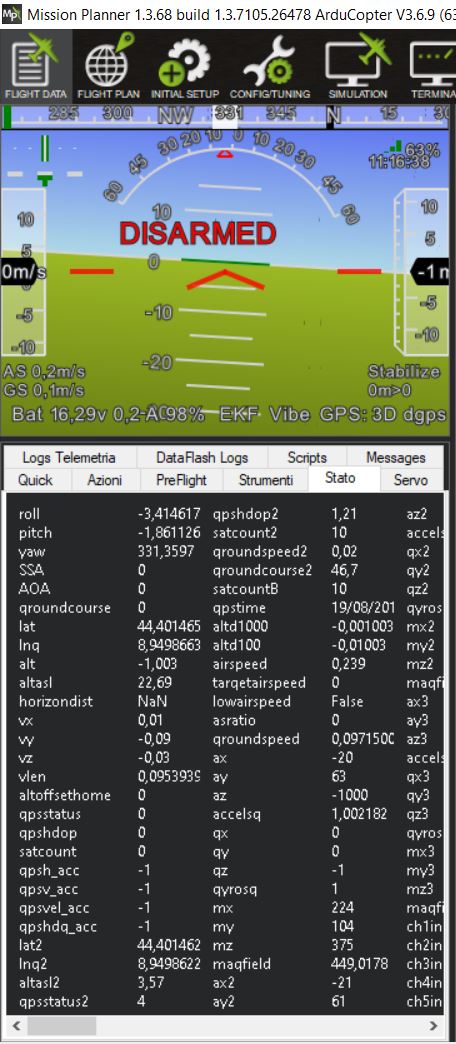
this is the screenshot of the MP flight data page. Today I didn’t get more than a 4 on gpsstatus2, probably for sky conditions but last week I managed to get a gpsstatus2 = 5 with RTK float with the same setup.
I followed precisely all the steps of this guide for the setup ArduPilot Integration | RTK Modules including baud rsate and all hardware configuration. Thanx.
Your settings in ReachView app are correct. I believe that this is a hardware setup issue.
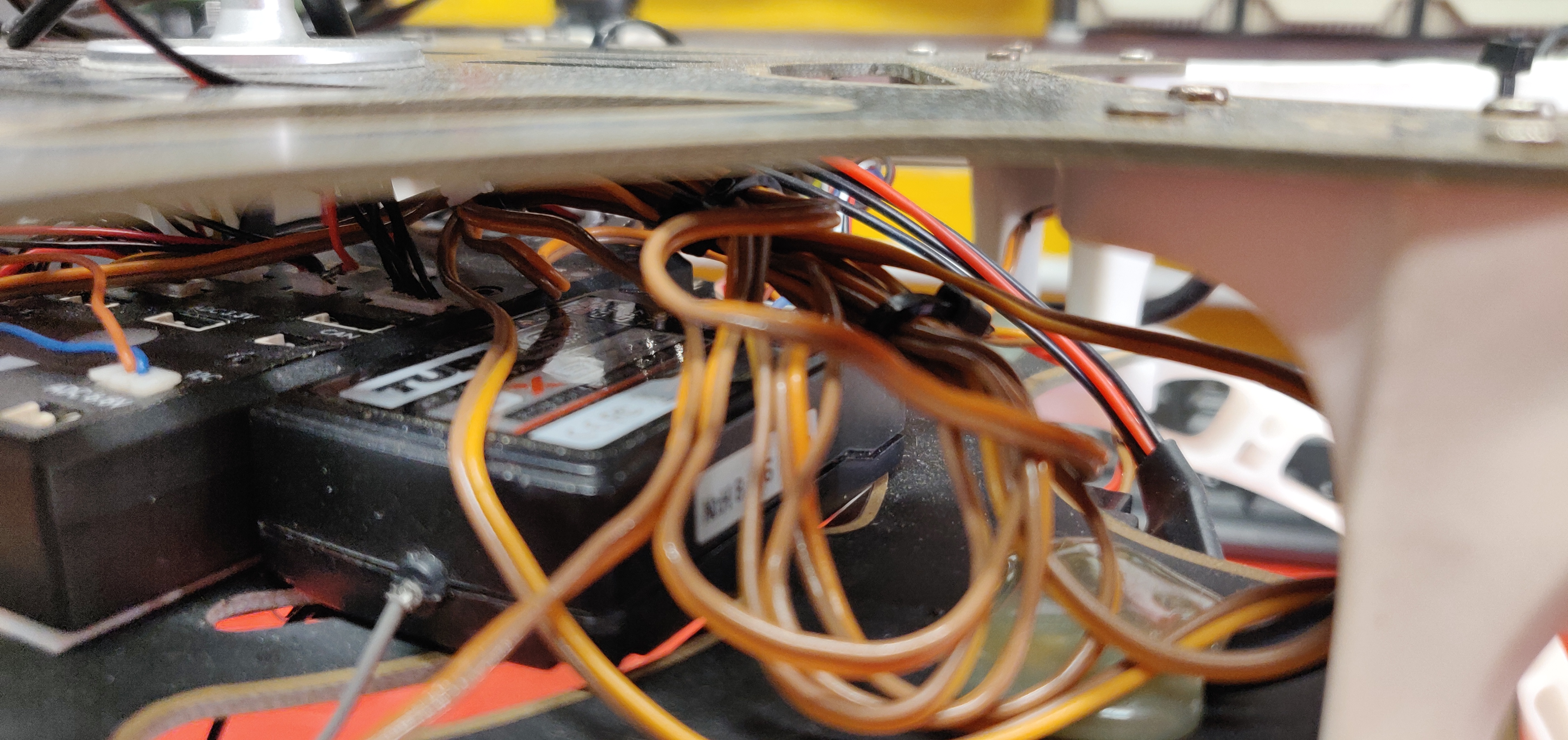
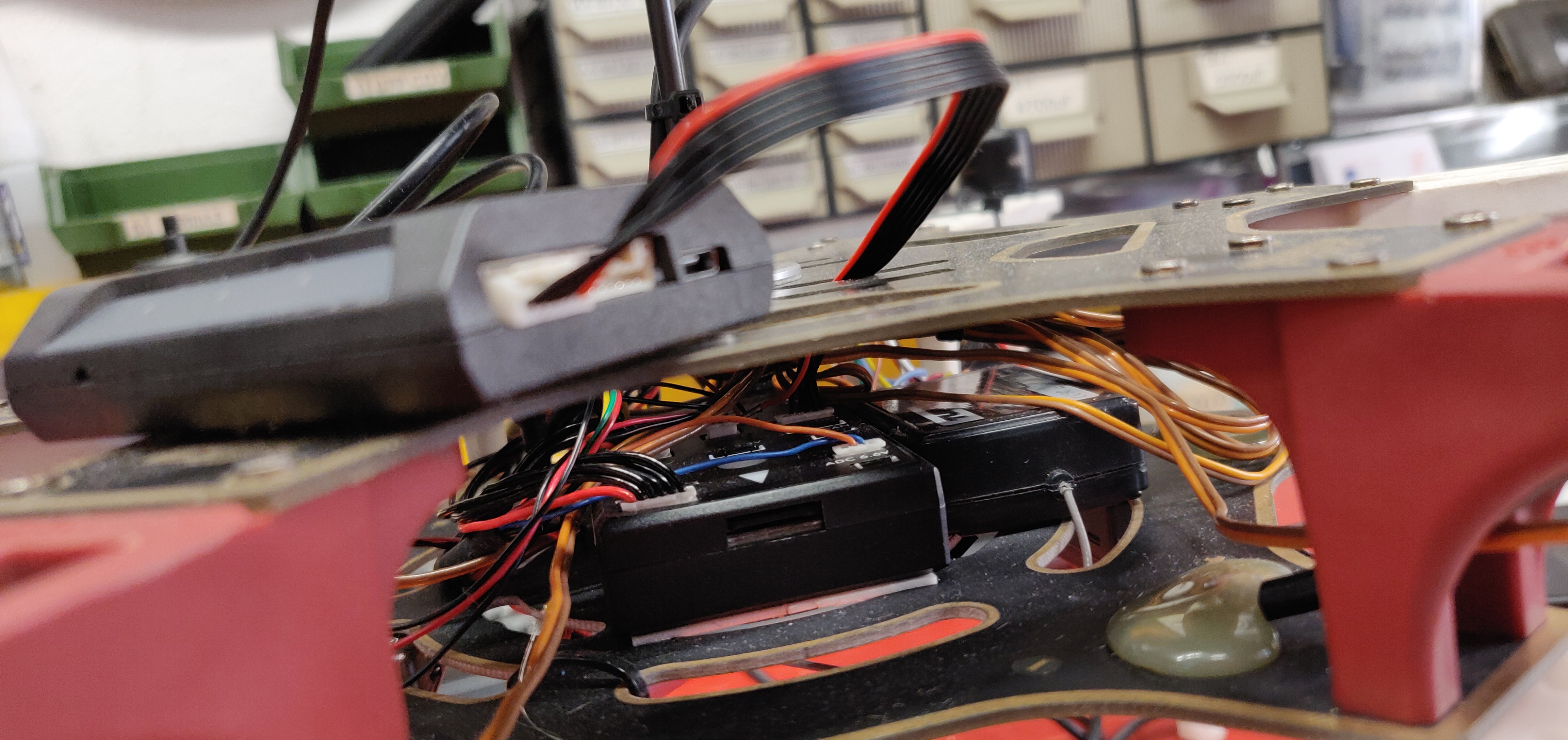
May I ask you to rearrange Tallysman antenna? Reach M+ antenna is sensitive to environmental interference. It has to be placed on a ground plane made of conductive material no less than 100x100mm. It should reduce multipath and provide shielding. Also, try keeping all electronics as far as possible from the antenna.
You can read more about antenna placement requirements in the following guide.