



[edited 4.7.2020 as I managed to get connection to NTRIP caster - but still no success to get GPS corrections]
Please help me getting NTRIP corrections!
My setup:
Emlid Reach M+ on top of table, tallysman GPS antenna, connected to PC USB-port for power. Nothing else, this is a test setup. Newest stable versions of software.
Trying to connect public Finnish DGNSS service https://www.maanmittauslaitos.fi/en/maps-and-spatial-data/positioning-services/dgnss-service (mountpoint DGNSS_VERKKO3 (network, The service uses the error modeling of the whole FinnRef network and sends corrections individualized to the user location (RTCM 3.2)).
Connection to server is okay, for example “Connected to 195.156.69.177/DGNSS_VERKKO3”.
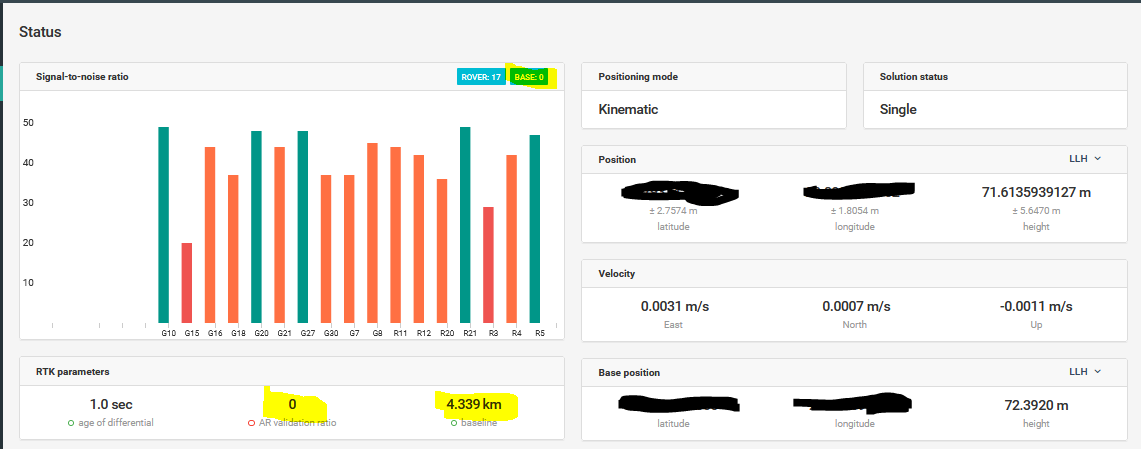
On status page, there is not and will no be nothing but 0 in AR validation ratio and solution status stays Single.
Here is Simple system report.
Simple system report
app version: 2.22.5-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 192.168.8.102
is_added: true
is_connected: true
is_visible: false
mac_address: ******
security: wpa-psk
ssid: ****
uuid: ***
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- 0
- 0
- 0
format: llh
mode: single-and-hold
output:
enabled: false
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1010':
enabled: true
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: false
constraints:
lora:
frequency:
- - 863000
- 870000
correction input:
input2:
enabled: true
format: rtcm3
path: avoin:***@195.156.69.177:2102/DGNSS_VERKKO3
send position to base: single
type: ntripcli
input3:
enabled: false
format: RTCM3
io_type: tcpsvr
path: :9028
device: null
logging:
base:
format: RTCM3
started: true
correction:
format: RTCM3
started: true
debug: false
interval: 24
overwrite: true
raw:
format: UBX
started: true
solution:
format: LLH
started: true
lora:
air rate: 2.6000000000000001
frequency: 868000
mode: read
output power: 20
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:38400:8:n:1:off
type: serial
output2:
enabled: false
format: llh
path: :9001
type: tcpsvr
rtk settings:
elevation mask angle: 15
glonass ar mode: 'on'
gps ar mode: fix-and-hold
max horizontal acceleration: 1
max vertical acceleration: 1
positioning mode: kinematic
positioning systems:
compass: false
galileo: false
glonass: true
gps: true
qzss: false
sbas: false
snr mask: 35
update rate: 1
