Hi, I am using a Reach M+ as a rover, and the Android app to control it. The same phone is the hotspot as well. My Base correction is coming through NTRIP, the base is within 2kms, and the delay is usually under 1.5 second. The region is more or less free of occlusions (2 floor buildings ~50 m away).
I have trouble getting a stable fix. Reachview version: v2.16.2. System report attached at bottom.
Steps:
- Start hotspot
- Start reach m+ (connects to hotspot)
- Place reach in the middle of the field, antenna far from powerbank, or reach
- Wait for fix
Observed problems:
- Getting fix takes a long time, sometimes won’t happen in 20 minutes
- Both base and rover sees lot of satellites (above 15), but very few are green
- Sometimes we get a fix, but lose it immediately, even with fix and hold
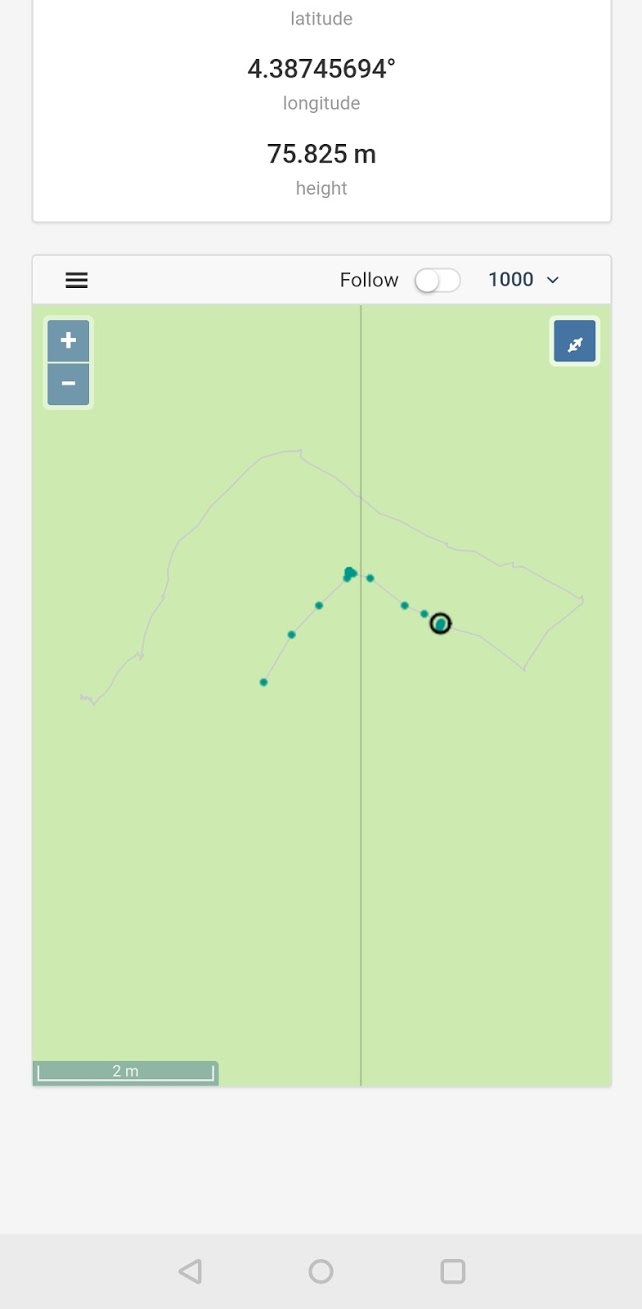
- Sometimes with a really strong fix (AR=999) the position won’t change when rover moves. On the map in the app, the green dots stay, but the gray line (what is that?) seems accurate and follows it
- Downloading the logs on Android does not work, the download button literally gets stuck
I need a reliable solution to get an accurate position. Any advice on my settings is welcome, I am new to the topic.
Post processing is also an option if you say it will solve my problems, but would be nice to see on the field if it is working (e.g. if it says float on the field, can I get fixed solution in post?).
Thanks a lot!
Andras
Simple system report
app version: 2.16.2-r0
'wifi_status, interface: wlan0':
- wifi_mode: infrastructure
- ip: 192.168.43.98
is_added: true
is_connected: true
is_visible: false
mac_address: 28:ED:E0:D6:77:7F
security: wpa-psk
ssid: trololo
uuid: 63475fde-9c20-49b8-8a11-96e65f59dc51
base mode:
base coordinates:
accumulation: '2'
antenna offset:
east: '0'
north: '0'
up: '0'
coordinates:
- '0'
- '0'
- '0'
format: llh
mode: single-and-hold
output:
enabled: true
format: rtcm3
path: tcpsvr://:9000#rtcm3
type: tcpsvr
rtcm3 messages:
'1002':
enabled: true
frequency: '1'
'1006':
enabled: true
frequency: '0.1'
'1010':
enabled: true
frequency: '1'
'1097':
enabled: false
frequency: '1'
'1107':
enabled: false
frequency: '1'
'1117':
enabled: false
frequency: '1'
'1127':
enabled: false
frequency: '1'
bluetooth:
discoverable: false
enabled: false
pin: '***'
camera:
duty cycle: 20
enable: false
period: 2
polarity: true
correction input:
input2:
enabled: true
format: rtcm3
path: 3me:***@[gnss1.tudelft.nl:2101/DLF10](http://gnss1.tudelft.nl:2101/DLF10)
send position to base: single
type: ntripcli
input3:
enabled: false
format: rtcm3
path: :9028
type: tcpsvr
logging:
base:
format: RTCM3
started: false
version: null
correction:
format: RTCM3
started: true
version: null
interval: 1
overwrite: true
raw:
format: UBX
started: false
version: null
solution:
format: LLH
started: false
version: null
lora:
air rate: 2.6000000000000001
frequency: 868000
output power: 20
position output:
output1:
enabled: true
format: erb
path: ttyMFD2:38400:8:n:1:off
type: serial
output2:
enabled: true
format: llh
path: :9001
type: tcpsvr
output3:
enabled: true
format: llh
path: :2014
type: tcpsvr
output4:
enabled: true
format: llh_ext
path: :2015
type: tcpsvr
rtk settings:
elevation mask angle: '15'
glonass ar mode: 'off'
gps ar mode: fix-and-hold
max horizontal acceleration: '2'
max vertical acceleration: '1'
positioning mode: kinematic
positioning systems:
compass: false
galileo: true
glonass: true
gps: true
qzss: true
sbas: true
snr mask: '20'
update rate: '5'