



Hello Emlid community! We are using ReachView version 2.3.1-r0 and image v2.3 and are currently experiencing some issues regarding hardware integration.
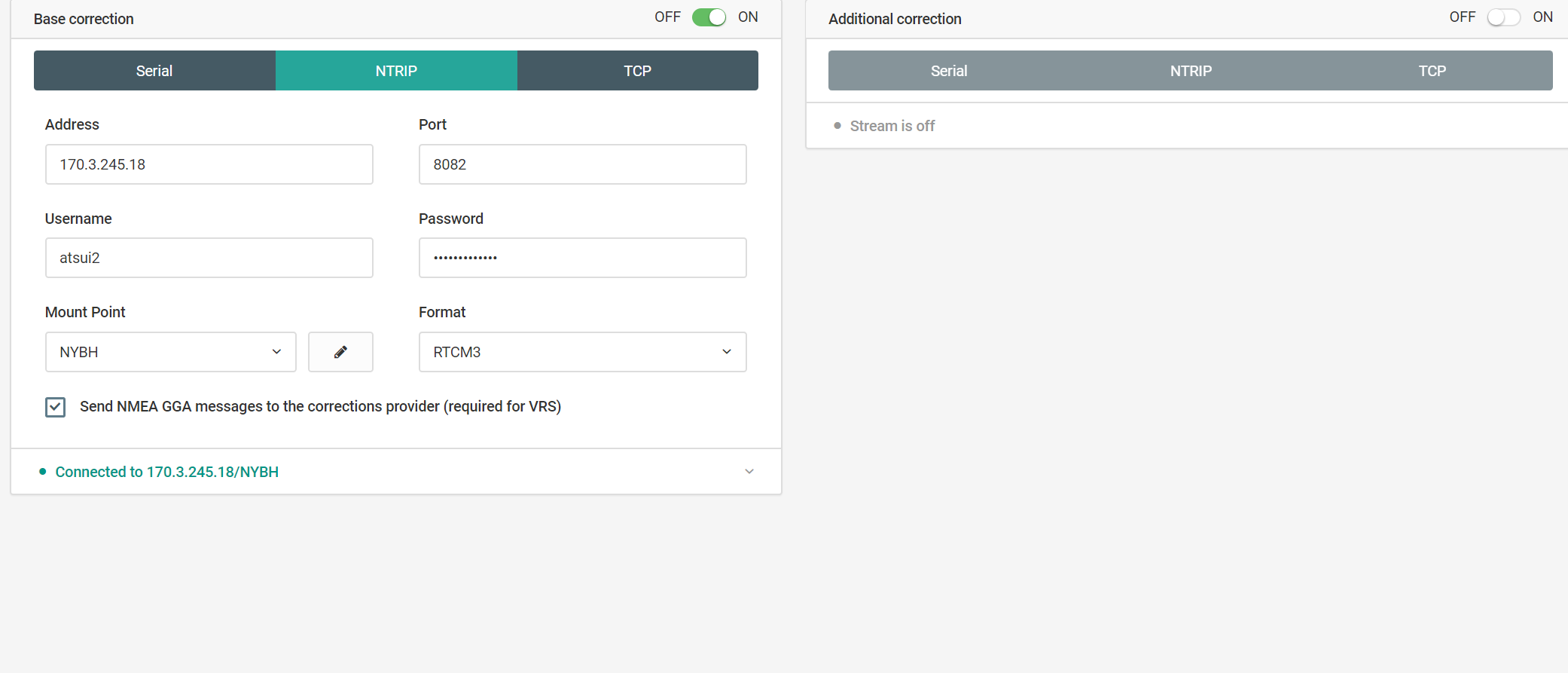
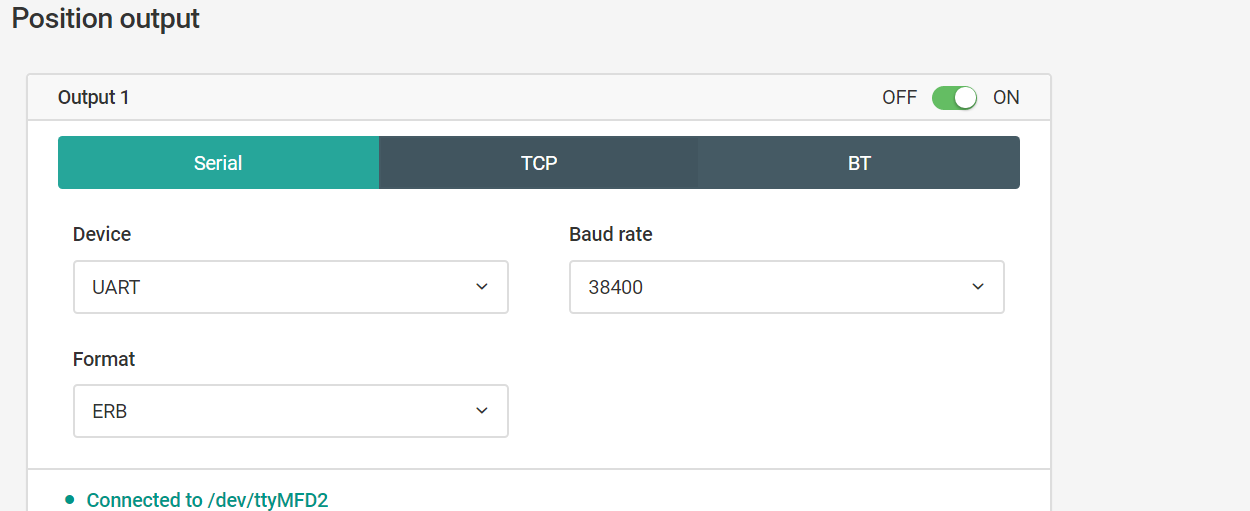
We have plugged in one Reach module as the rover to the serial 4/5 of our Pixhawk Clone (HKPilot32). We are currently only using one Reach module and are streaming corrections to the rover using NTRIP. The module itself is able to get a ‘fix’ on the ReachView App and we are able to get a pretty accurate plot.

(Images taken from an earlier version ReachView, sometime over the past weekend)
We are using Mission Planner to monitor some settings of the quadcopter and we are unable to get gpsstatus2 to show anything other than 0 so we are pretty sure the Pixhawk Clone is not receiving any GPS data from the Reach Module. Below is our current configuration

Our current Mission Planner settings are as follows:
GPS_TYPE2 - 1
SERIAL4_BAUD - 38
SERIAL4_PROTOCOL - 5
GPS_AUTO_SWITCH - 1
GPS_INJECT_TO - 1
We are using the Reach Module as a secondary GPS, hence these settings.
Any help would be greatly appreciated. Thank you!