Meet the new Beta version of Reach firmware — 33 Beta 1.
This release is available for Reach RS3, Reach RS2/RS2+, Reach RS+, and Reach M+ receivers (not available for Reach RX and Reach M2).
Here is the list of the major changes.
Added features:
Ability to send corrections via 2 channels at the same time.
Signal strength indicators in Reach Panel: for Reach RS2/RS2+ when receiving corrections over LoRa and for Reach RS3 when receiving corrections over LoRa and UHF.
Mobile connection configuration to speed up the connection.
Reach antenna registry to improve the usability of Reach as a rover to a third-party base.
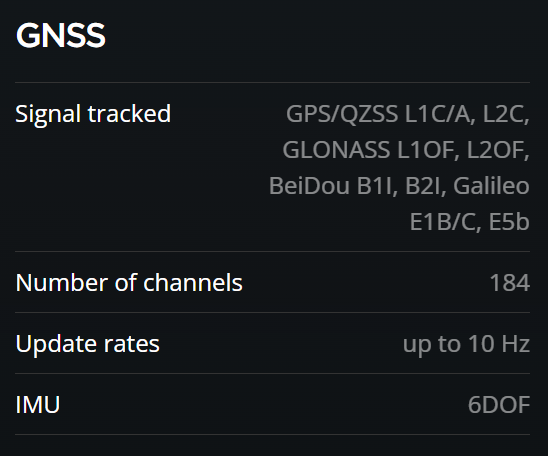
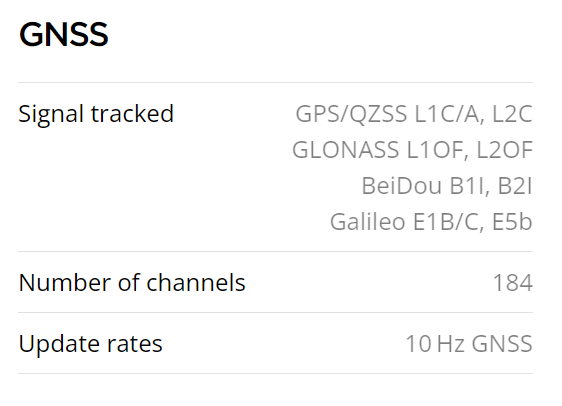
GNSS chip firmware for Reach RS2/RS2+ and Reach RS3 to improve the quality of the position calculation.
Due to the updated chip firmware, we have removed the 10 Hz GNSS update rate for these devices. Reach RS2/RS2+ now only outputs the position at 1 or 5 Hz. Reach RS3 outputs position at 5 Hz only.
Check out the new beta release and share your thoughts in the comments. We’d love to hear your feedback on the new features and fixes.
As you know, the higher the Hz rate the SMOOTHER the motion (feedback) of the rover when displayed on a data collector… which I use Surface devices and FieldGenius. It’s always been set to 10Hz for the smoothest fastest feedback of my rover. 1Hz is not useful, 5Hz is, but 10Hz was always the best.
What I don’t understand is why are we going backwards and removing features and from the SPECS? This messes things up that were working fine or better before.
prime example… they removed the STATIC setting (for multi-bands devices) and now only have KINEMATIC… which I understand why they did it, but it seemed to add more confusion than anything.
I understand where you are coming from but the only case I can see 10Hz would even be a factor is if you were speeding down the highway. I’ve used 5-10Hz with the receiver mounted on a truck and taking 2sec interval shots at 30mph and there was no difference in the data. Of course I’m not looking at the data collector while I am driving though. If you are walking fast enough that 5 corrections/sec isn’t enough then something else is wrong. Or your device is glitching.
Understood. But as you know, it’s the point of downgrading features that have ALWAYS been there from the start and what are in the SPECS.
There are probably users that actually require that double speed 10Hz and why they purchased it.
example:
I remember this below where the old RS was used to track a Honda racecar in real-time. Video etc doesn’t work anymore. Either way, I just don’t agree with altering features after the fact, beneficial or not. I guess we’ll just have to see why this is so.
Regarding the X5, true that the update is 100hz, but max output rate is 20hz. There is a difference there.
If a 20hz rover and a 5hz with 100hz imu went side by side on a fast track, I would put my coin on the imu device for beeing the smoothest one, and also the accurate one (if its a good IMU)
I agree that could be more of a problem with the L1-only devices. Although the RS/RS+ are 6-8 years old. That’s about end of support cycle for pretty much any technology. Fact is that unless you are on Reach vs Reach running LoRa you’re not going to get 10Hz and even 5HZ in a lot of cases because network RTK only transmits 1Hz and a lot of other equipment on receives 1Hz, like the mavic 3E when connected to local NTRIP. I still get your point.
There is a NOTICEABLE LAG difference when using 1Hz vs 5Hz and 10Hz settings for ROVER movement on data collectors. 1Hz is garbage.
Either way, curious to WHY this is going the route it is from Emlid. My guess is they will say 5Hz is no different than 10Hz so removing it. We’ll see.
Just my experience but I am the only one I personally know that has ever used 10Hz where it might have been a benefit even though my testing didn’t show such. Construction layout and machine control never goes higher than 5Hz, none of the local Land Surveyors I work with do either. NTRIP doesn’t even support 5Hz so I don’t see it being an issue at the end of the day. I am still interested in the possibility that it’s software/hardware related and more of a lag than a frequency that is too slow. Using 5 corrections per second should be more than enough. Are you using 10Hz transmission via LoRa on your base?
I don’t know. But from the wording Viktor posted, I would guess that the chip firmware is taking more time to resolve a superior position. And thus, Emlid is making a choice between higher precision and sustainable output speed. I doubt they are testing removing it willy-nilly.
Yes of course… IMU, aided by GNSS to correct drift inherently associated with IMU positioning.
But are Emlid receivers more on the side of GNNS positioning (with aid of IMU) or vice versa, IMU positioning (with aid of GNSS)? (The www.moasure.com device is more along the lines of this MINUS GNSS aid to mitigate drift).
I guess in the end here… what is the reasoning of potentially dropping 10Hz? What is the benefit and is this the tradeoff?