We are announcing the release of Reach Firmware 32, our latest update packed with new features, improvements, and crucial fixes. This update ensures seamless integrations of Reach RS3 across various surveying apps and enhances the performance of Reach receivers.
Key features and improvements
Enhanced Reach RS3 capabilities
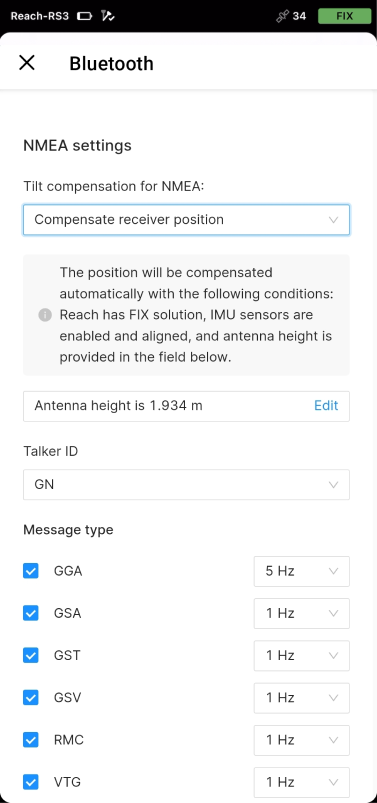
With this update, Reach RS3 can send NMEA GGA and GST messages with compensated position data, improving accuracy and compatibility with third-party software.
Improved tilt compensation and better RTCM3.2 reception over UHF radio. This improves the precise performance and range of communications in demanding environments.
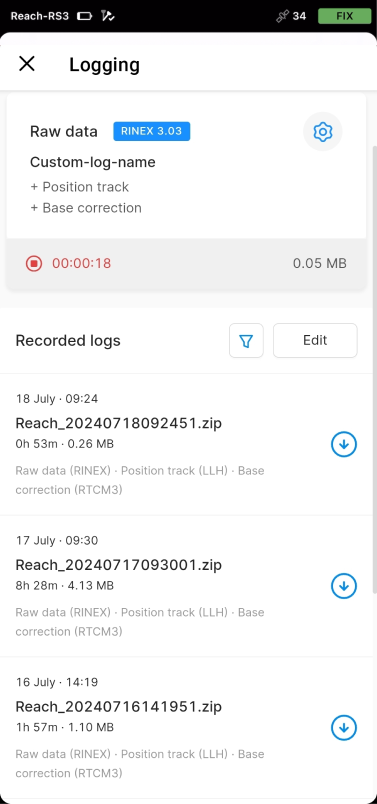
The updated log list interface simplifies log management, making it easier to navigate and operate.
You can now rename logs and split them at 00:00 UTC, enhancing organizational capabilities and data management.
We’ve made it possible to download logs and generate a full system report even when the system is stuck or self-tests fail, ensuring efficient troubleshooting and support.
We’ve resolved issues where Wi-Fi would fail to reconnect to lost networks, ensuring stable and continuous operation.
Our update improves the stability of firmware updates over mobile data, minimizing interruptions and ensuring smoother updates.
We’ve removed the first-time setup. You can now operate a receiver without rebooting right out of the box if there are no critical updates.
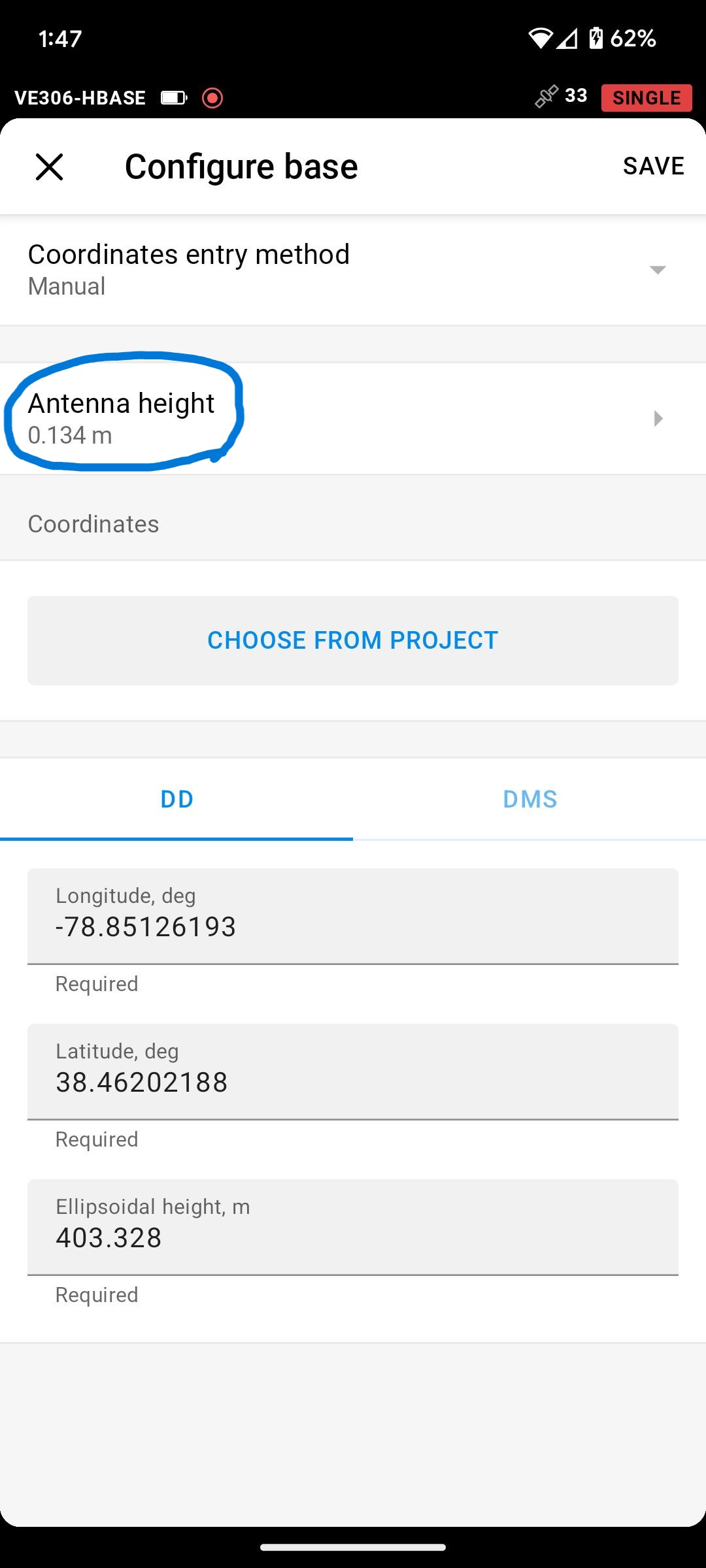
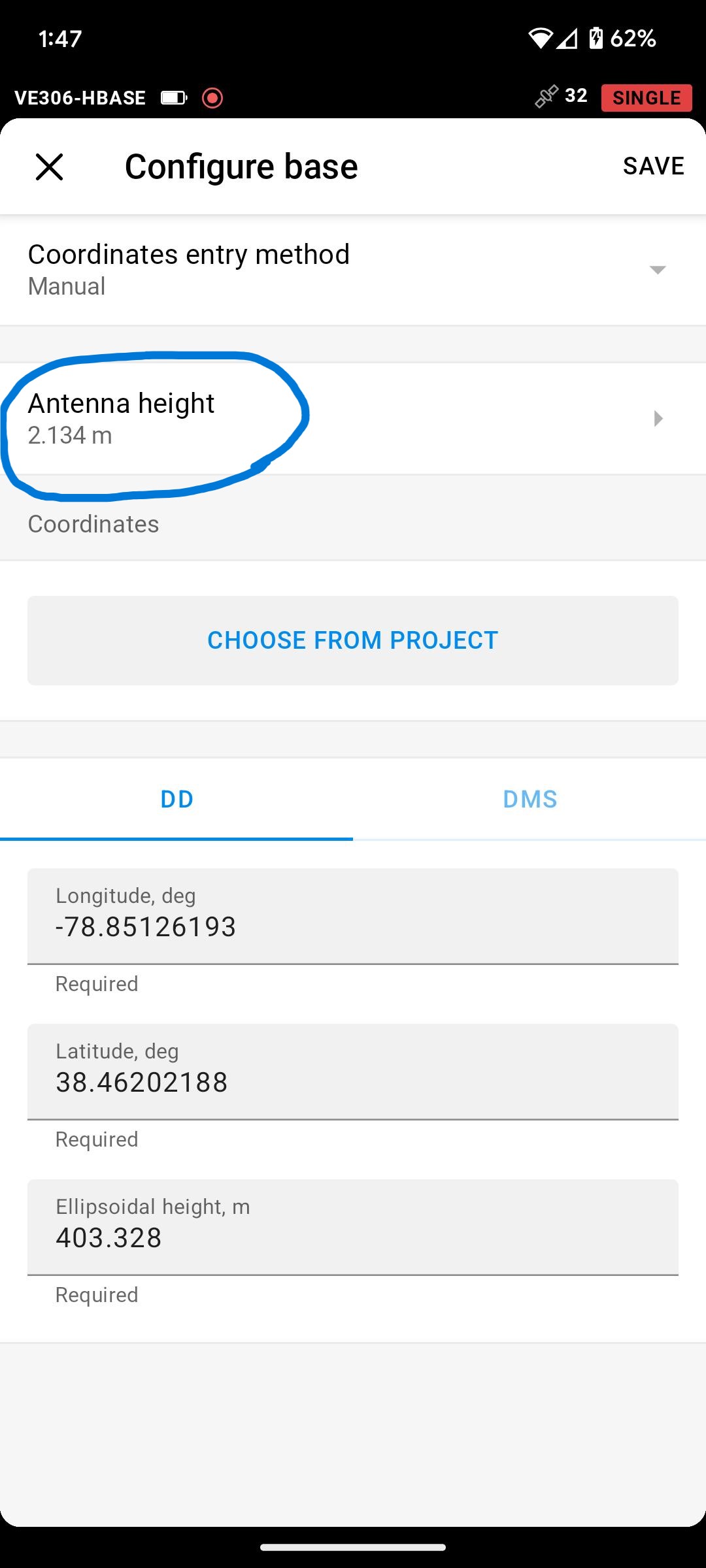
We’ve introduced a single antenna height storage. Now, if you enter the antenna height in one tab (e.g. in Logging or Base mode), it will be applied across other app tabs.
We fixed
Cases where Emlid Flow loses connection with Reach when opening the list of available logs.
Cases where the available update is not visible when Reach is connected to the internet via SIM card.
Cases where Wi-Fi fails to reconnect to a lost network.
Cases where the UBX log could not start correctly.
Tilt Compensation status notifications for Reach RS3.
Cases where Reach firmware update was not possible via mobile data.
Cases where no error message is displayed after a failed update attempt.
Cases with no decimal digits in the antenna height settings on iOS devices.
Some cases where changing the Reach name could fail.
Some cases where Reach RS3 couldn’t be charged properly.
Reach Firmware 32 is available for Reach RS3/RS2+/RS2/RS+ and Reach M2/M+ receivers.
I tested the NMEA messages from Reach RS3 with firmware version 32, and it worked fine. The streamed positions were tilt-compensated. Can you please share some more details about what you experienced in your survey? Did you face an issue with particular NMEA messages?
The update appears to be working well; however, we have hit one snag. Emlid Flow app users automatically connect to our stationary base when at the office and inadvertently set the antenna height in the base settings. When connected, setting the measurement antenna height in a project sets the base antenna height. Can we have an option to disable the single antenna height storage in future updates? We can move the stationary base to a different subnet on our office network as a workaround.
Do I understand correctly that you’re using the same receiver, sometimes as a stationary base and sometimes as a rover? If not, after the receiver is set up as a permanent base, you don’t need to connect to it later during the surveys.
Our stationary base (RS2) is on the same wifi network as our users’ mobile devices and is not used as a rover in the field. The Emlid Flow app will automatically connect to the base while at the office. If a user prepares a survey project in the office and sets a measurement pole height in the flow project, the base antenna height will change. In our situation, the base antenna height was inadvertently changed from 0 to 2 meters because someone altered a survey project and was simultaneously connected to the base.
If your users are in the office and not connected to a receiver that will be used for the actual survey, why are you setting a pole height at all? Wait until you are in the field to specify the base settings. Typically, when you are not connected to a receiver, there is no way to specify base settings. In your case, because you have a base on the network, the app is connecting.
The antenna height in the measure dialog just needs to be checked for accuracy before working with points in the field.
I can agree with Dave. When you’re on the field and connected to your rover, there’s nothing to modify under Base settings, as your receiver is not acting as a base. Also, when you’re connected to your base in the office, you don’t have to change anything in the projects.
I tried the same with two receivers, and changing the pole height in the project while connected to the rover didn’t affect the Base settings of the base.
I updated an RS3 receiver being used as an NTRIP Rover from previous stable to Firmware 32 and immediately started having issues in the field with Emlid Flow 360 messages to move the receiver and the status becoming red. I did have similar issues when testing 32 Beta 3 and had a tech support ticket for this issue. The problem is still happening with Firmware 32 GA release, although the messages are not as frequent as they were with Firmware 32 Beta 3. I am using a Bluetooth connection to the data logger if that matters. At this stage I would prefer to roll back to previous stable if possible. Can the previous firmware be downloaded directly and will manually updating the firmware lose any of the receiver configuration.
Tilt compensation operates based on the receiver’s movement. If it stays in the same place for a while, the calibration needs to be done again. That’s why the status bar becomes red and asks you to move the receiver.
Did you experience it despite the receiver moving?
I just wanted to note that updating Reach’s firmware does not require reflashing it. You can use the updater in Emlid Flow under Settings → Firmware updates. To see the available updates, make sure that Reach is connected to the Internet.
I did notice that the message to move the receiver did occur when being stationary for a while, this didn’t seem to happen with the previous firmware. When the warning appeared after being stationary for a while a short period of movement would quickly return the status to green.
I did however notice that the warning also came up as I was walking with the receiver. The combination of this and the need to keep moving the receiver when somewhat stationary for a while makes me want to roll back the firmware.
I’m happy to provide logs etc. if you would like them.
What is the process to roll back to previous stable?
The IMU is indeed stricter in the new 32 firmware version, as we’d like to make it more robust. Currently, the focus is on short measurements and, of course, on avoiding any chance of errors. But we’ll also try to find a way to focus on making the longer static measurements more straightforward.
We always recommend using the latest stable firmware version on Reach receivers, so we don’t provide an option to roll back to previous versions.