It is nice to be able to set a static IP on Wifi but I am still waiting to be able to change the static IP on USB to be able to use two receivers on the same PC. And also set a static IP when using an Ethernet adapter.
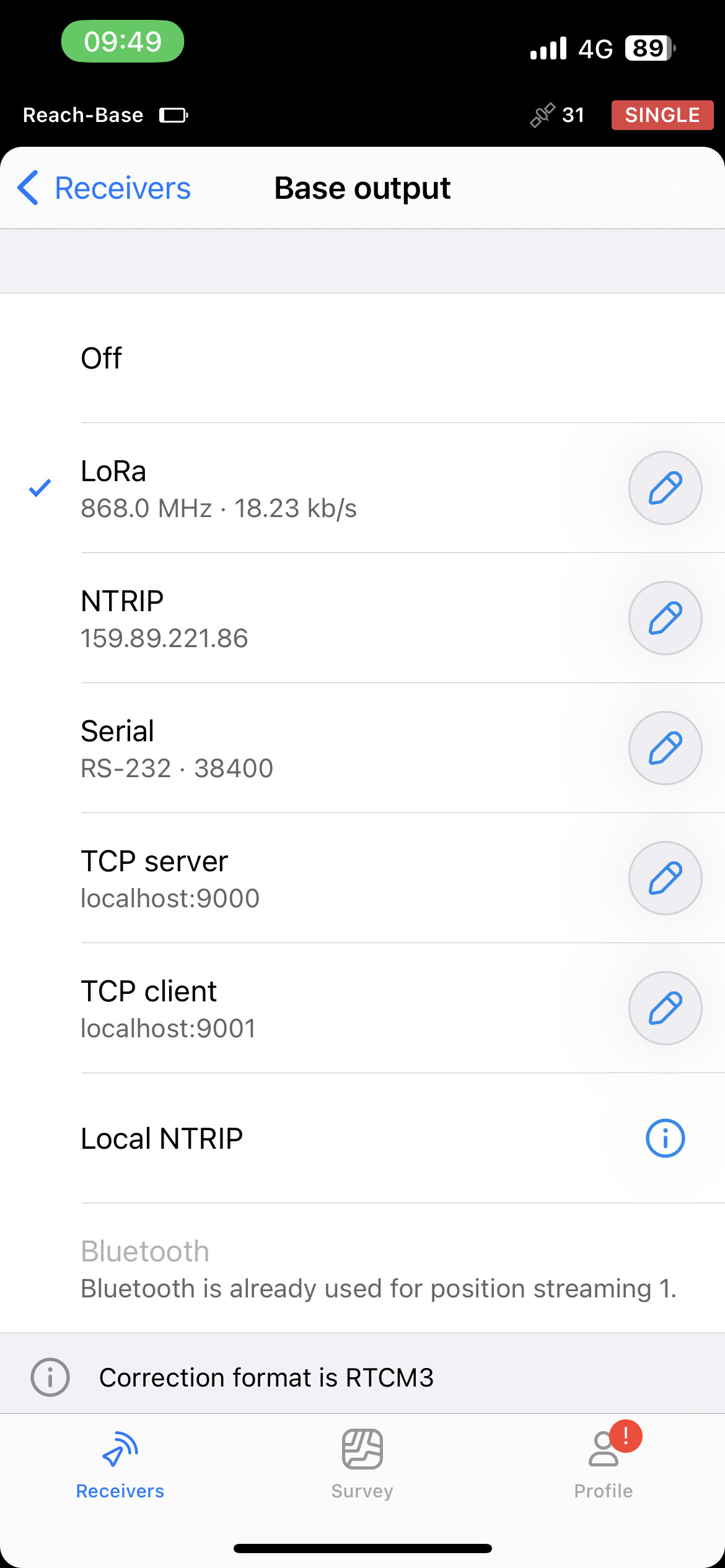
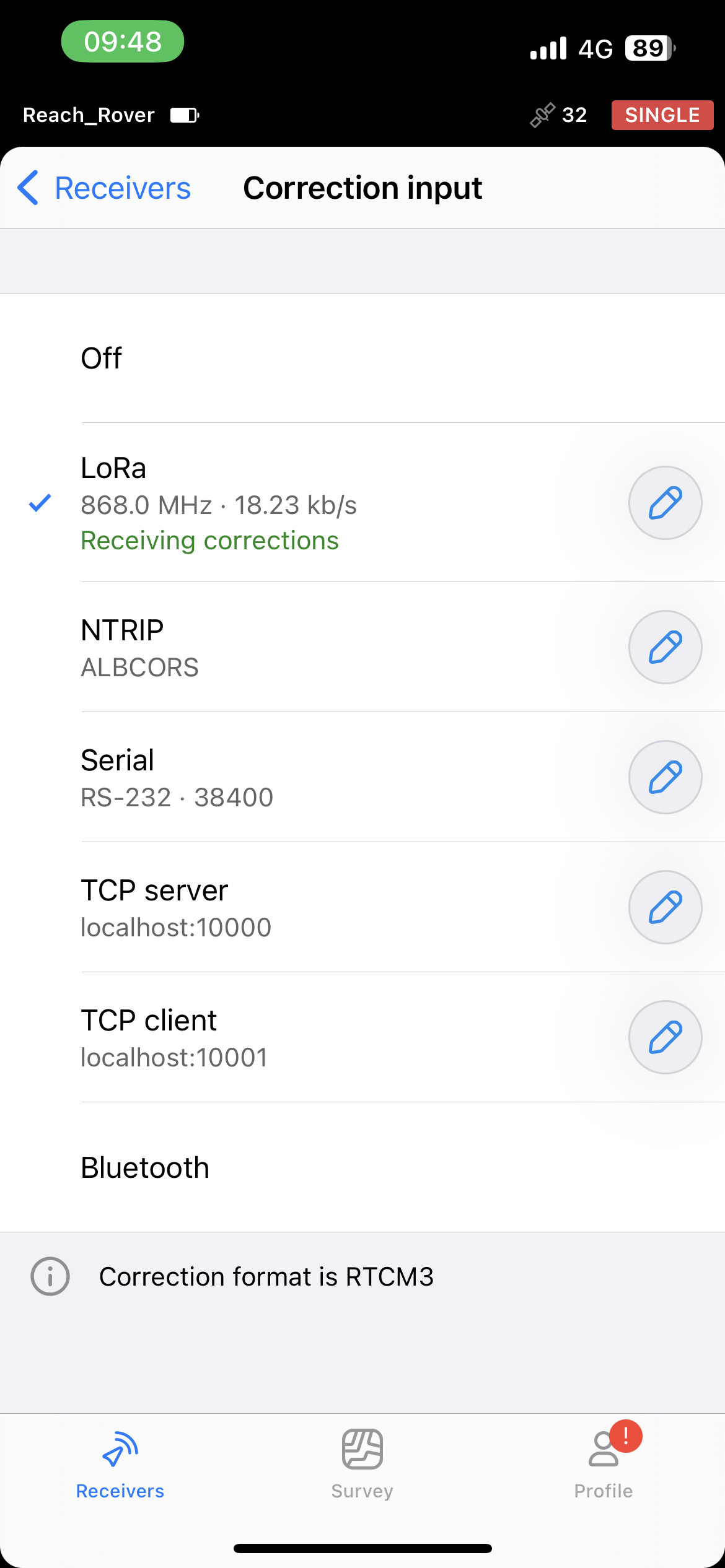
Seeing an odd behavior with this release. Setup using base/rover my rover will receive corrections for a few seconds over LoRa and fix then stop. I can turn off LoRa and restart it will fix for a few seconds then quit again
Let me know if you need any additional information
I see that you’re in touch with Kirill regarding this issue. Can you please send the Full system reports from the receivers to Kirill? We’ll analyze both reports to understand what causes this behavior.
Hello everyone!
Thank you for providing feedback on the 31 Beta 1 release! Today, we are introducing the new version of Reach Firmware—31 Beta 2! This version includes important bug fixes, new features, and improved stability. Check it out!
New features:
Updated LoRa frequency constraints for different countries.
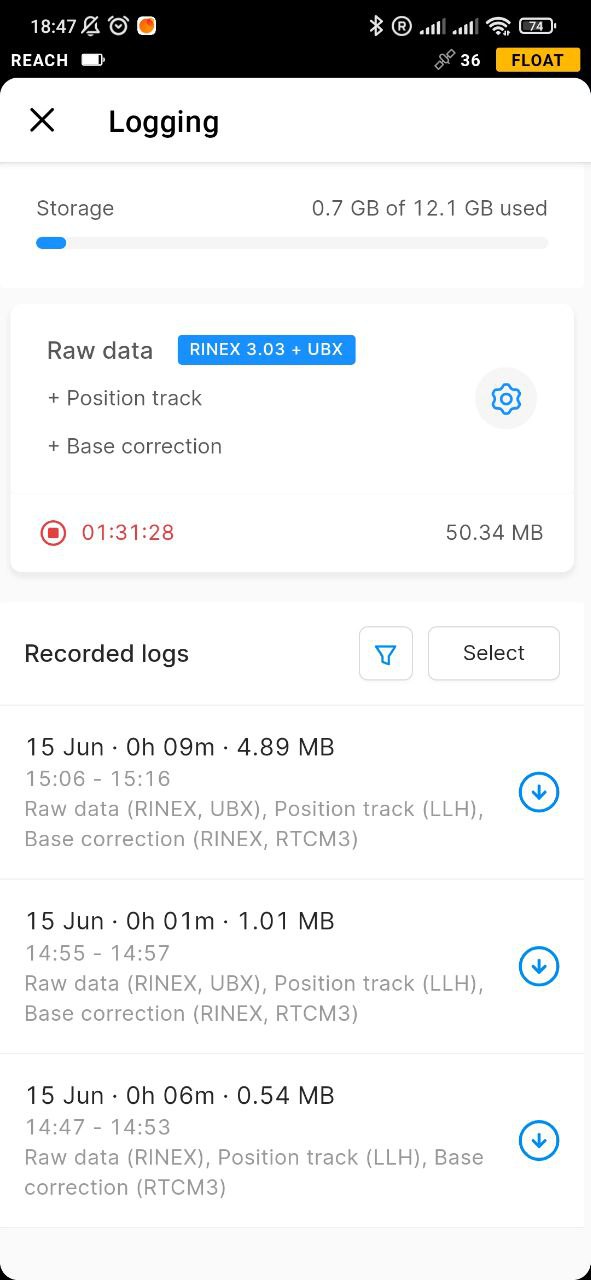
Logs from the same session are now saved into a single archive.
Fixes:
Fixed an issue where Wi-Fi couldn’t be enabled again after it had been shut down.
Fixed an issue where the NTRIP caster hostname couldn’t be resolved after a reboot.
Fixed an issue where the Reach hotspot couldn’t assign an IP address to client devices.
Downloaded 31 Beta 2, to RS2 (Rover) but not to RS+ (Base) (YET)
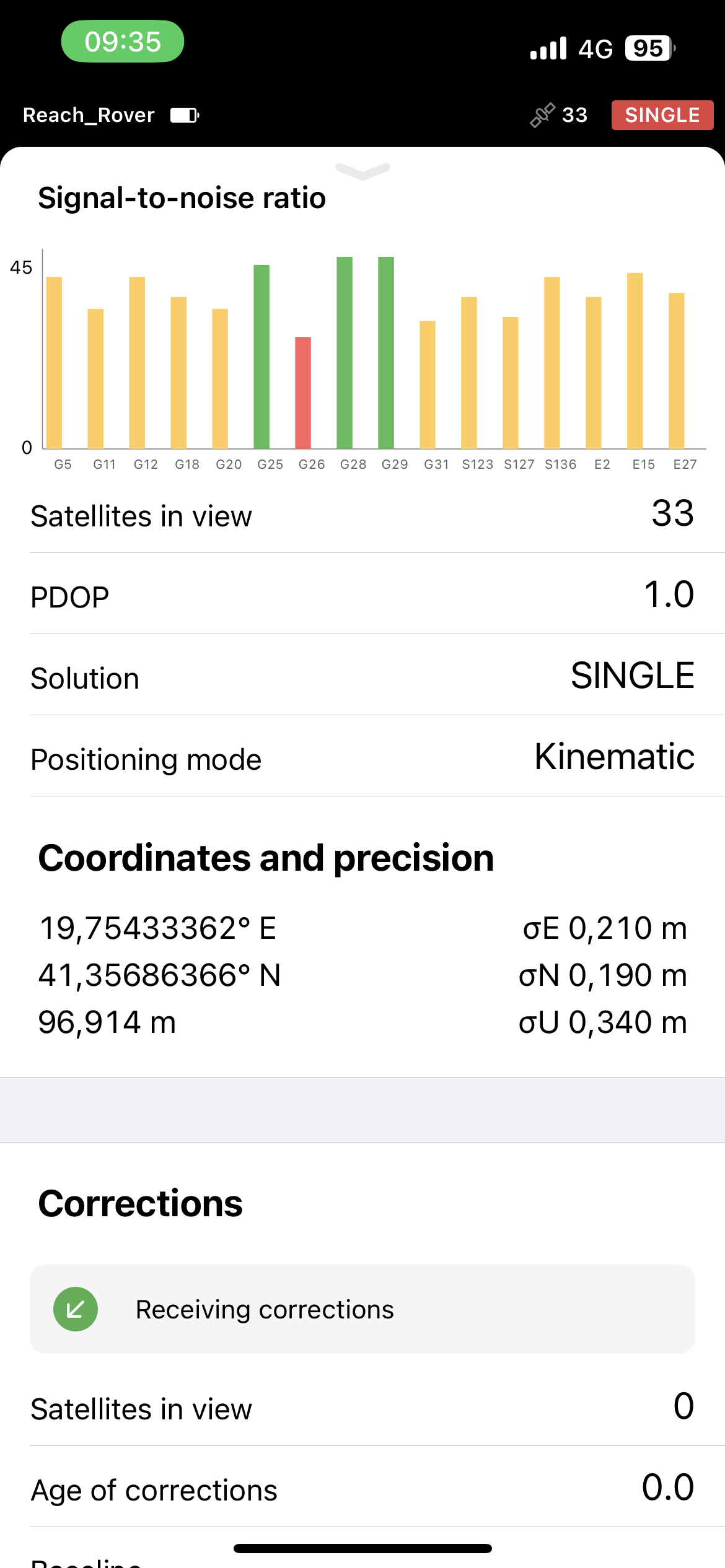
Immediately went to “Fix” Solution…
I have not been able to get a fixed solution for 4 - 6 weeks or longer…
This is not a field test, but am looking forward to seeing some results soon.
Update - Field test failed… Unable to get fixed position in the field.
Updated base to 30.2 Beta, units about 50 ft. apart… had a fixed position for about 5 seconds…