Hi Andreas,
i don’t know if its possible to run the rtknavi.exe with the reach receiver, but of course it’s possible with a separate ublox Neo M8T-USB-Board (available at CSG Shop). I tried it with the original RTKLIB-Code and wrote a little tutorial in german language: http://www.archeotech.de/DGPS-mit-RTKLIB/
If you want to compare original RTKLIB, Emlid and rtklibexplorer-Code, a raspberry pi might be a good solution (pull the code from the various repositories, compile and start rtkrvc).
But then you have to fight with all the config-options, that’s why i love reach. The Emlid guys do a great job making rtklib easier to use…
Dirk
I think what you are asking Andreas, is if you can:
Do normal RTK with a Reach base and Reach rover.
At the same time, send rover raw log to rtknavi.exe on your laptop.
At the same time, send base RTCM3 messages to rtknavi.exe on your laptop.
Have ReachView status page open in your browser while watching rtknavi.exe at the same time.
Sounds like fun!
This functionality is not supported by ReachView. No matter. Getting a second set of the base’s RTCM3 messages to rtknavi.exe is no problem. However, redirecting a copy of the the rover’s raw log to rtknavi.exe might be a bit tricky.
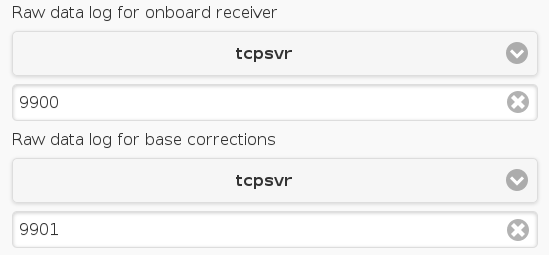
This functionality is supported by ReachView. Simply use the rover to serve it’s raw log and the base’s corrections by TCP server:
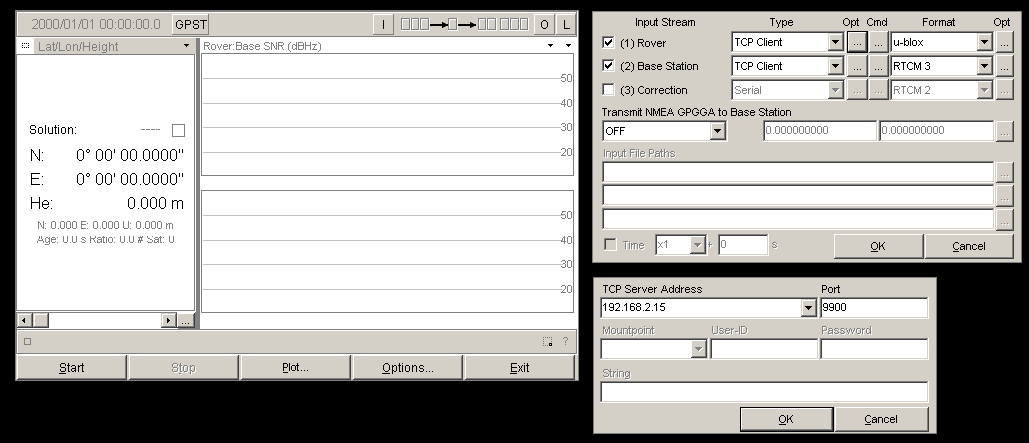
Then set up RTKNAVI to use a TCP Client for each data stream: