We are working on integrating Reach RTK with APM based flight controllers. Initially the integration is being tested with Navio+, but other platforms, such as Pixhawk will be supported automatically once it works. We wanted to give an update on the progress since this is a much anticipated feature.
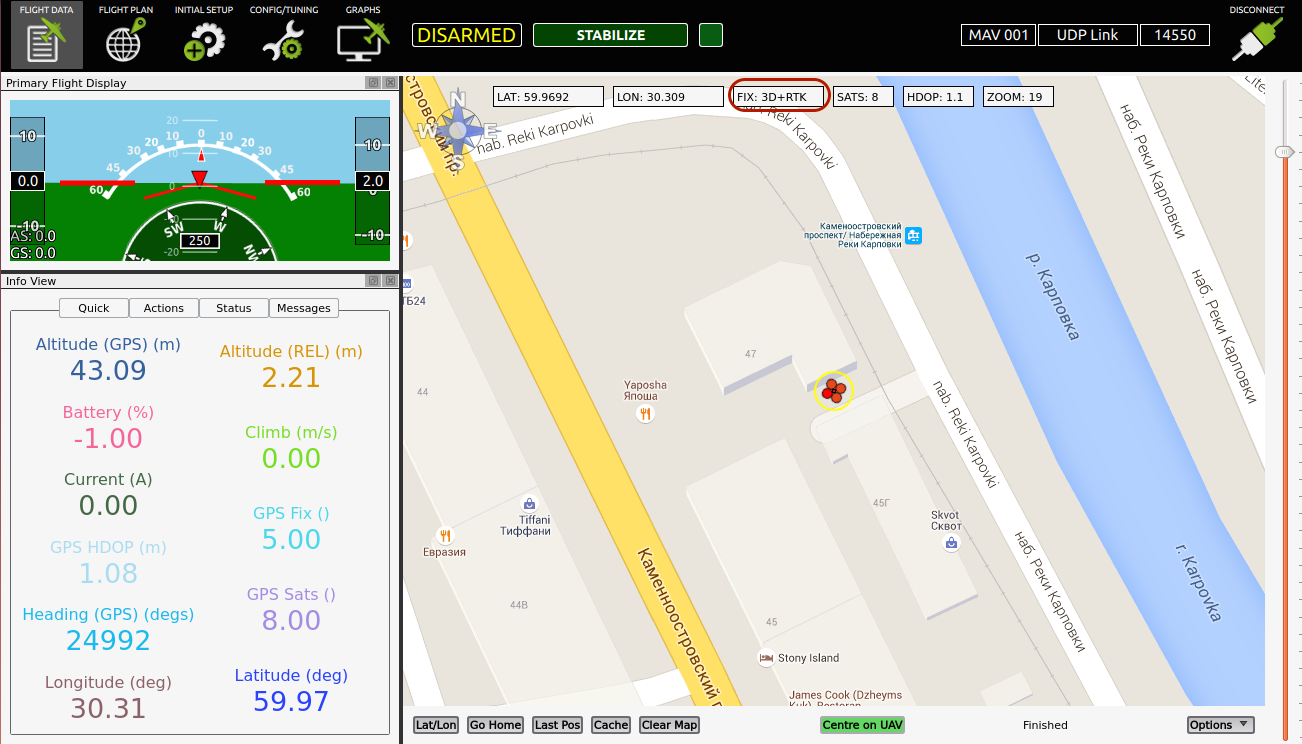
Today we have reached an important milestone and got two systems to work together. Navio+ is getting data from Reach over Serial port and correction over Wi-Fi from the second Reach. Both antennas are on the roof. Nothing prevents from getting the corrections through the Mission Planner, MAVlink and your standard telemetry radio.
Reach is communicating using custom ERB(Emlid Reach Binary) protocol, which transfers all required data to APM. There is actually much more than just the coordinates! Corrections are delivered over industry standard RTCM3.
There is still a lot to be done, we need to improve the code, test everything and merge required changes in APM and Reach upstream. After we release first beta, which should happen within a few weeks you will need to update both your flight controller and Reach RTK through the app.
These cool features are being brought to you by Alexey with help from Egor and Georgii. Great job guys!
This is great news. I´m so glad you guys have started the work on the APM integration. I have built my tricopter from scratch and RTK GPS is the “only thing” missing before I will be able to complete the setup. Wow, I´m looking forward to put this to good use.
We have fully bench tested the integration and are ready for first test flights. Corrections over telemetry radios and Mission Planner are working nicely so far. For you integration will be in just connecting a single DF13 cable, which was provided in the kit.
Now we are waiting for the weather to allow us to make flight tests.
Next steps:
Flight tests and report
Pull-requests to APM to have Reach support in upstream
Reach update (through the app) to support ERB output
Provide custom Navio/Pixhawk firmware builds for public beta
Howdy! I received my Reach modules yesterday, and I am super excited to start using it!
However I have some questions, first can (and should) I run the original GPS with the Pixhawk in tandem with the Reach module? The only reason I would do this is it isn’t saving me any weight by NOT using it (GPS and compass are in the same module) and it never hurts to have a backup. I would move the original GPS to Serial 4/5 and put the Reach module on the GPS header.
Should I be concerned with the distance between the receivers? Theoretically if they’re a foot apart and the Pixhawk switches between the two it will move. Obviously they wouldn’t be a foot apart, but that gives a good example.
Will the Reach module need any sort of setup? For instance, with the RFD900 modules you need to run setup software before you use them. Will that be the case with Reach? If so, are you planning on incorporating that setup into mission planner? (I realize that wouldn’t be a priority)
Thank you so much, I look forward to using the Reach RTK module in the future
Yes, you can use Reach as second GPS. As soon as it enters RTK mode, Pixhawk will switch on using it.
Your normal receiver will not be near as precise to have a need to account for that.
There is an ongoing work in APM to handle GPS switching gracefully.
Yes, you will need to select appropriate settings. Please have a look through our quickstart to get a sense of what is it like working with Reach. It is more sophisticated device than a telemetry radio, so it will have it’s own interface for settings.
Would it be beneficial to plug the Reach module into the GPS port, that way the Pixhawk sees it as “first” GPS? Would having the Tallysman on a GPS mast be better than sticking it to the Carbon fiber frame? I know there can be issues with the CF interfering with some signals.
As for the setup, I did see the setup guide for use with android (I unfortunately didn’t gleam much info from it) I’m assuming the key points are the startup messages? Is there anything else that needs to be done? (I realize I may be getting ahead of myself here). Is there another quick start guide that I missed?
Figured I should give an update, I’ve got both of my boards updated and running, I had issues with getting the IP addresses right (local network not the modules) I would recommend advanced IP scanner instead of Fing. Also if they don’t show up right away, wait, seriously took mine like 20 minutes to be discovered. The next step I need to do is connect them to the Pixhawk (I’ll need to switch to the serial input, but that can wait). Really looking forward to some better weather so I can take everything outside, but its currently snowing here…again.
If I plug it into serial 4/5, where in Mission planner do I enable it?
Also what’s a good strategy for monitoring GPS units if there’s more than one installed. Would be nice to know which one is currently the primary and what kind of data they are each getting.
If you click tuning in the data menu you can click the boxes for GPS status, GPD HDOP, for sat count for either GPS unit. You will not have the HDOP accurate at the bottom of the screen but you can get an idea of how they are behaving. Hope it helps.
Looking forward to the RTK enabled release! (Copter 3.4 correct?) In the mean time, I have some questions on how the base station is incorporated into Mission Planner. I would greatly prefer to run the base station through USB. Personal preference, my laptop’s wifi card is…iffy at best. Also this was my understanding of how the ground station integration would be happening. Since I know very little about the system and how it works, is there any way you guys could add USB ground station connection to the integration documents? If this is not possible I would love to know that and to know why, mostly out of curiosity
Thank you so much for such a wonderful product. I can’t wait to start flights with this system! (I’m currently waiting on the full release and a 333 exemption)
George
Awesome! you guys have had amazing support for the reach and having it incorporated in 4 months is really impressive! I’ve been debating going pixhawk or navio2 for my future projects, as I am a big pixhawk junkie but I think ya’ll have swayed my opinion! Thank you again for making such a great project and having such amazing support!
I think I will wait till the 3.4 release as I have had issues in the past with non ‘official’ releases. If this was a smaller aircraft I might try it, but its not sadly (not to mention its not even technically mine…)








 but I think ya’ll have swayed my opinion! Thank you again for making such a great project and having such amazing support!
but I think ya’ll have swayed my opinion! Thank you again for making such a great project and having such amazing support!