dnunovf
January 6, 2023, 1:49am
1
I have the following hardware setup =>
RaspBerry Pi 2 Model B V1.1https://files.emlid.com/images/emlid-raspbian-20220608.img.xz
The following command shows →
pi@navio:~ $ sudo emlidtool
//==========================================
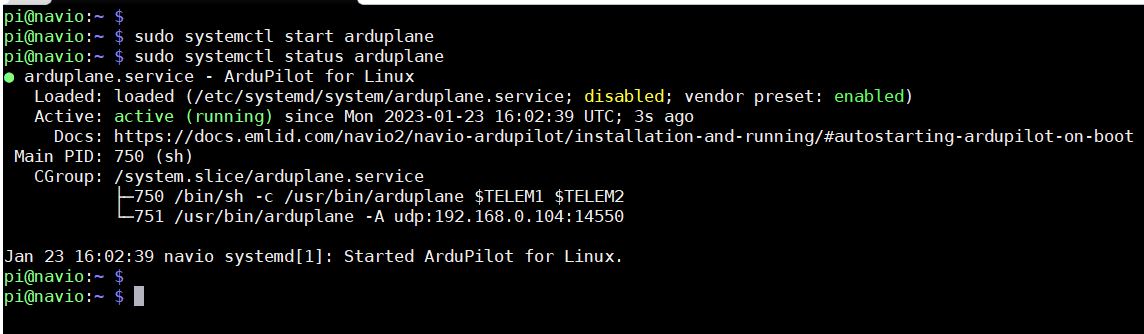
I´m using the follwing command to start arducopter
sudo systemctl start arducopter
the service fails to start and i saw the follwing errors in the log /va/log/messages
Jan 6 01:10:54 navio kernel: [ 1075.447838] rcio spi1.0: rcio_pwm: Error in pwm running count
There is no additional hardware or changes made. I have just NAVIO+ connected on my RaspBerry Pi 2.
any ideia ?
Hi @dnunovf ,
Maybe you’ve already checked that, but I see it says the following:
Did you make sure Navio is properly attached to the RPi? Have you used this device before? Or is it the first time?
dnunovf
January 9, 2023, 3:07pm
4
@svetlana.nikolenko
I’ve had the NAVIO+ for a long time, but I’ve never used it on any drone because the idea was to study first.
Now some time to continue studying so I downloaded the latest version and i´m facing this error.
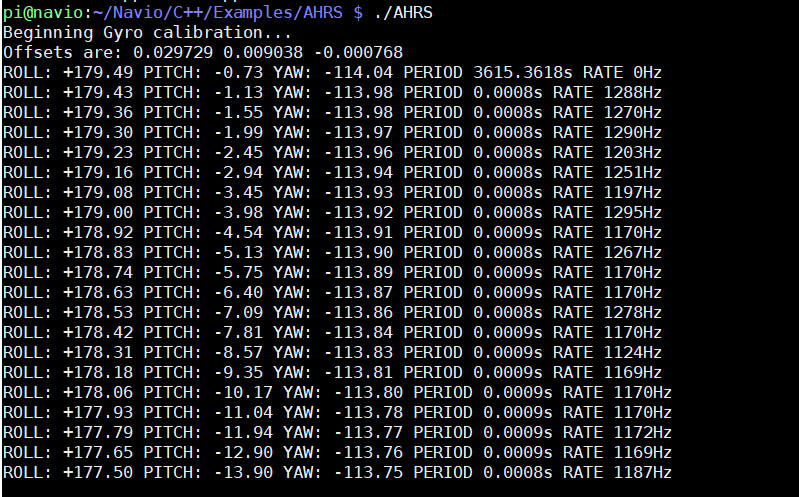
But as you can see, I can get information from the Gyroscope.
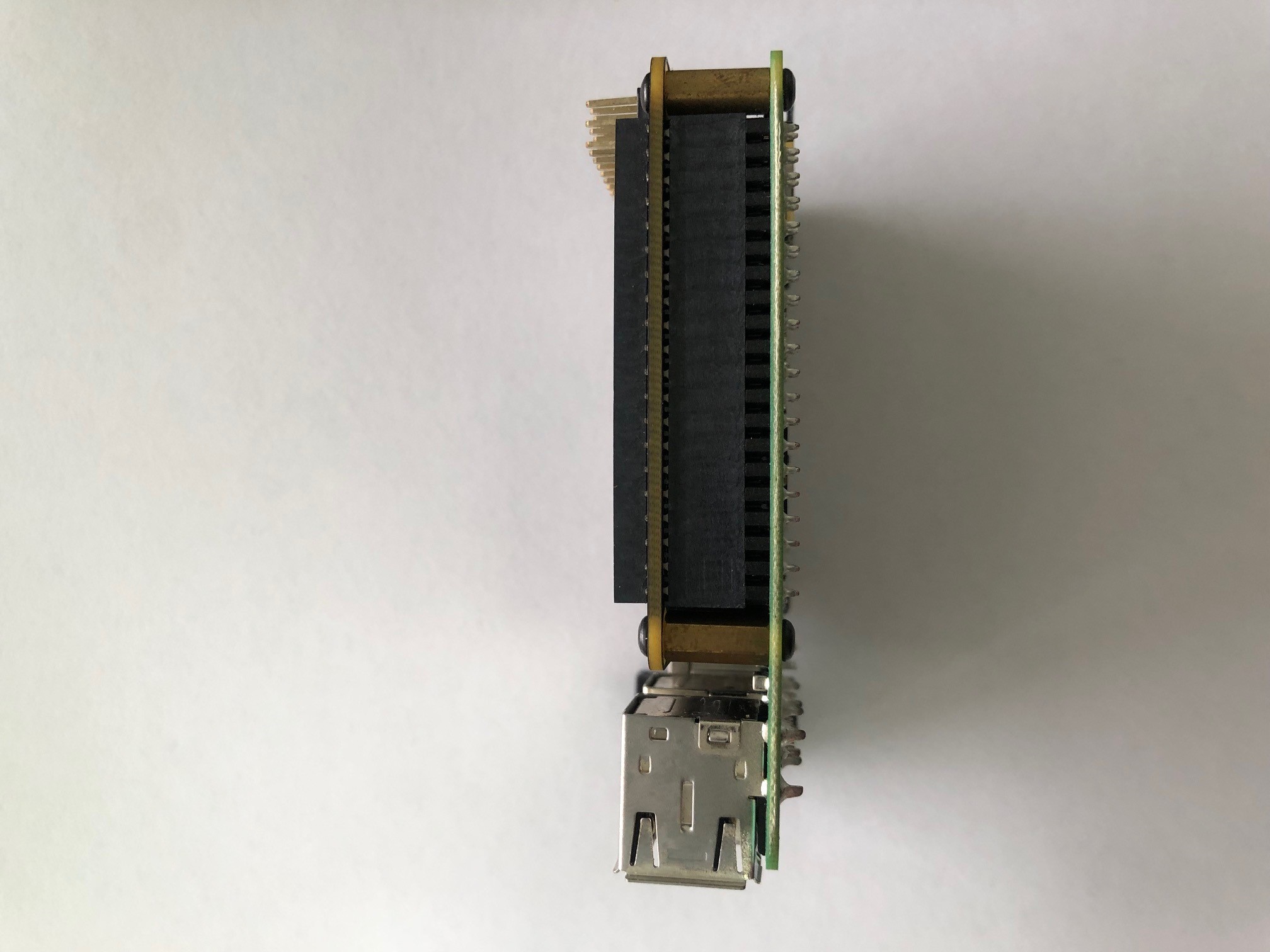
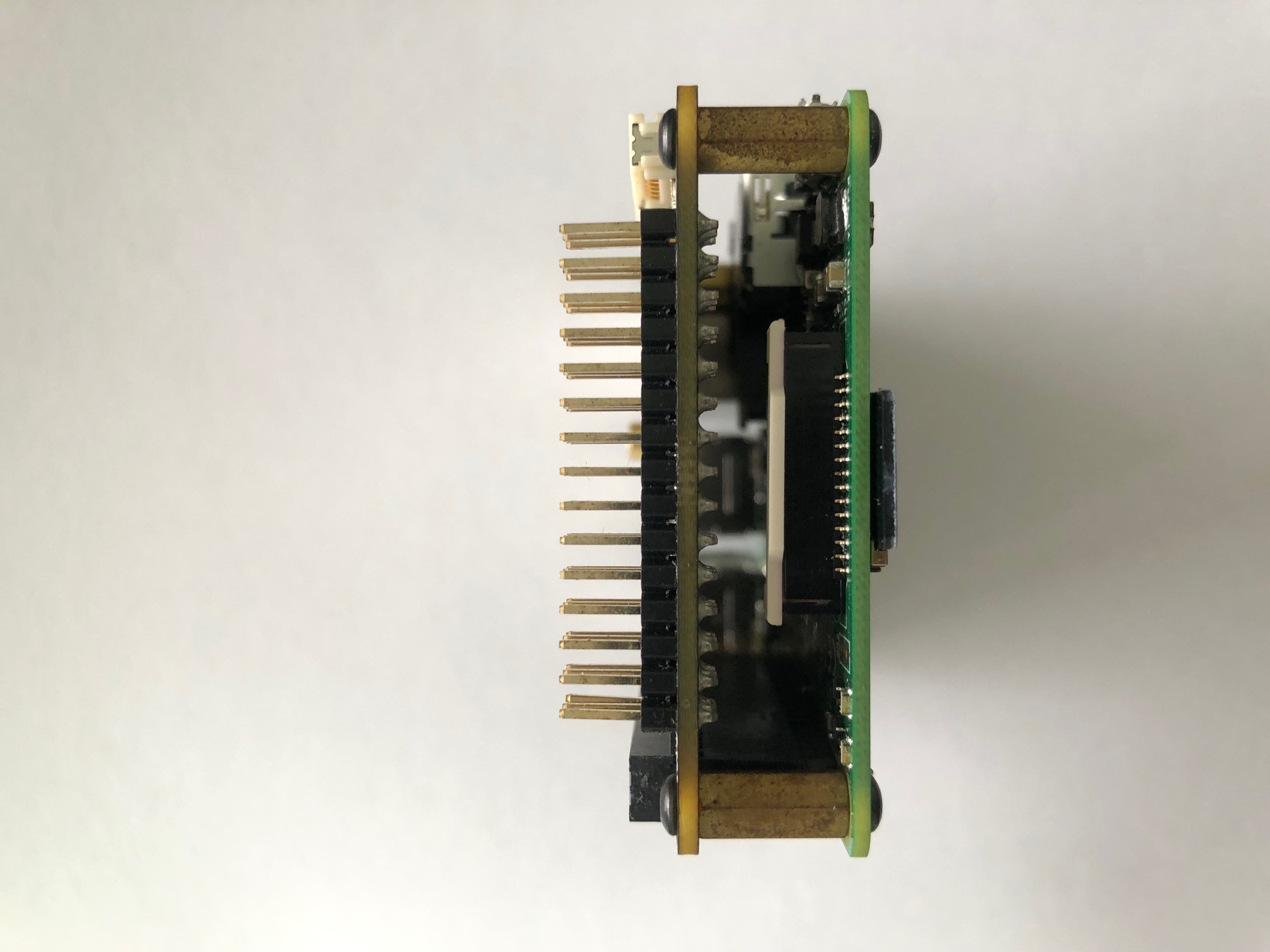
Additionally, here are some photo of how Navio+ is connected =>
dnunovf
January 10, 2023, 10:40am
6
Here goes the “/var/log/message” log
messages.log (25.8 KB)
dnunovf
January 10, 2023, 10:42am
7
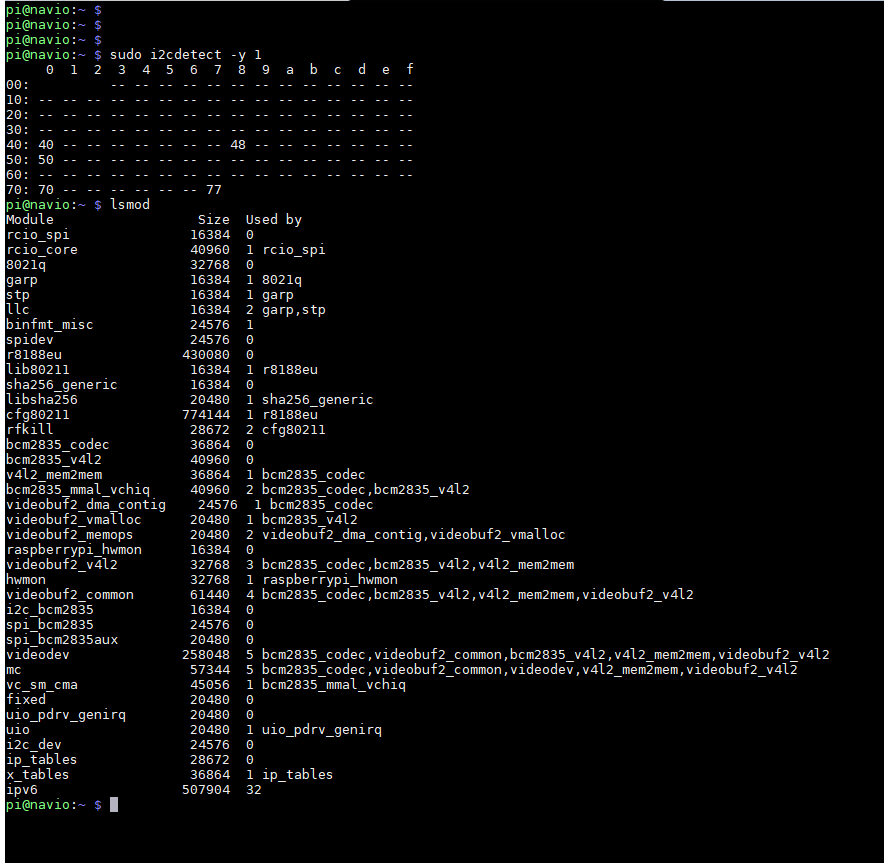
emlidtool_test command is not working →
dnunovf
January 11, 2023, 1:30pm
10
@svetlana.nikolenko do you have any update ? Can you help me ?
Hi @dnunovf ,
I saw your messages, thank you for the details! I need a little bit of time to think about possible reasons for this. I’ll get back to you as soon as possible.
Hi @dnunovf ,
I’ve discussed your case with the team. Still, the main assumption is that there is no proper connection between Navio+ sensors and RPi.
Navio+ may even be screwed too tight. Also, it is possible that the GPIO extender is faulty and does not allow a proper connection. Maybe some of the pins are bent or not being inserted correctly.
In the photos, it looks fine. But most likely, there is something that couldn’t be seen in the photos. You can try to unscrew it and attach it again or look for another extender. But if it doesn’t help, it seems something happened to the connectors themselves, which can hardly be fixed.
dnunovf
January 23, 2023, 3:55pm
14
Hi @svetlana.nikolenko thanks for the answer.
I would like to show you a different approach.
dnunovf
January 23, 2023, 3:58pm
15
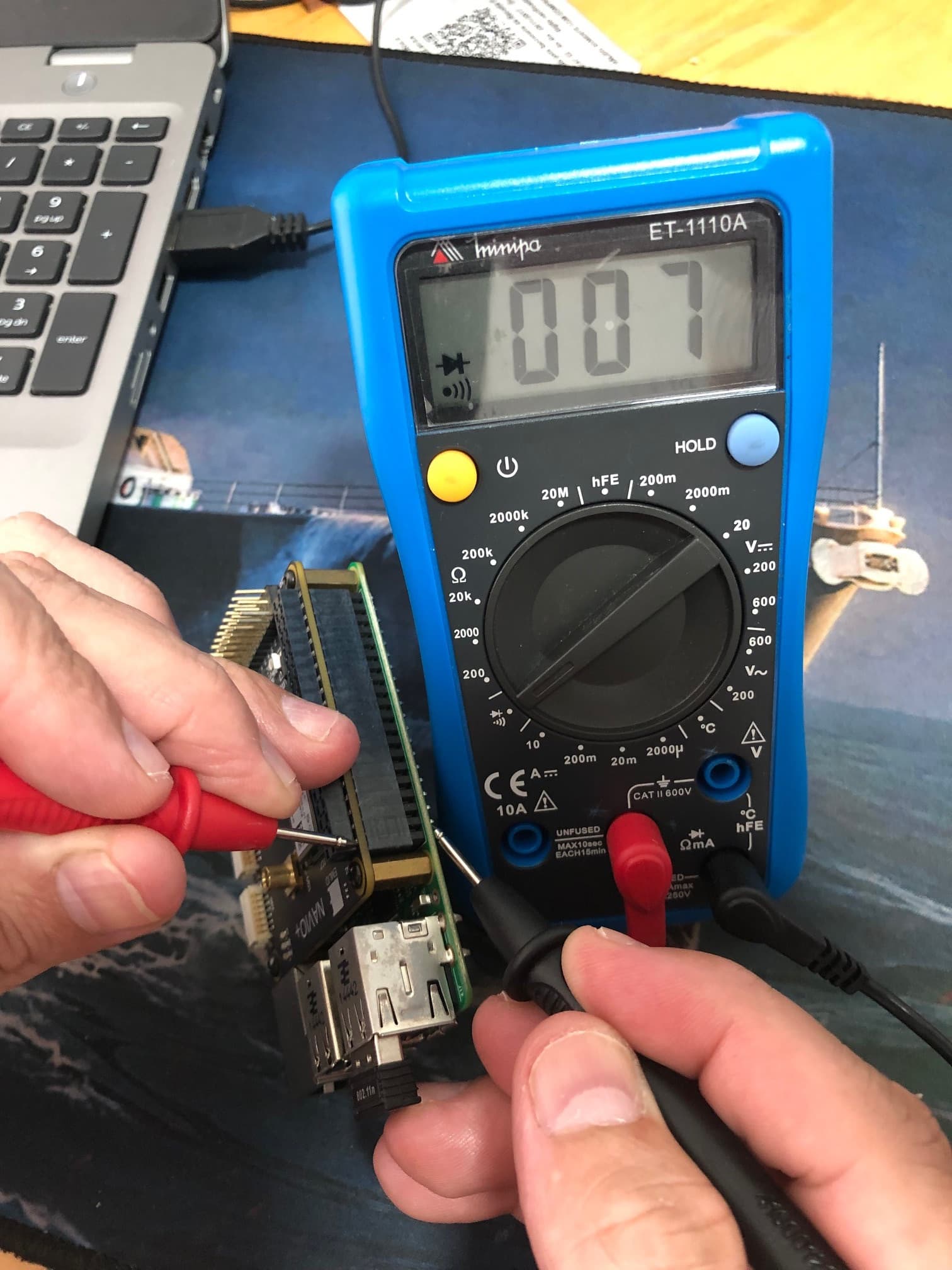
@svetlana.nikolenko
I used the multimeter to determine if there is a connection between all the pins on the Raspberry and the Navio+, and yes they are.
If my test is not properly, please let me know how can i did it .
dnunovf
January 23, 2023, 4:05pm
17
@svetlana.nikolenko
while I was waiting for your feed-back I did some tests using previous versions of linux that I downloaded from the site:
This error appears in versions after “emlid-raspbian-20190227”.
Therefore, I am using the “emlid-raspbian-20190227” version.
The arduplit service does not fail and the “mission planer” also connects and I can see the sensors working, such as the compass, gyroscope, gps …
I understand that it must be something in Linux and not hardware. Do you have the same equipment in the laboratory that I have to reproduce?
dnunovf
January 23, 2023, 4:09pm
19
Mission Planer messages =>
1/23/2023 1:08:23 PM : EKF2 IMU0 Origin set to GPS
Thank you for the tests! Sorry, didn’t expect you to have a multimeter, but such a test is a good idea.
That’s an interesting finding.
I’ll discuss your case with the team. But I can’t promise fast results here. In the meantime, am I right the emlid-raspbian-20190227 version works for you?
dnunovf
January 30, 2023, 5:07pm
22
@svetlana.nikolenko
Yes works. Apparently the sensors reflected the information in the mission planner.
Good, thanks! So, if there is any news, I’ll get back to you. But as I said before, can’t share an ETA, unfortunately.
system
May 11, 2023, 6:47pm
26
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.