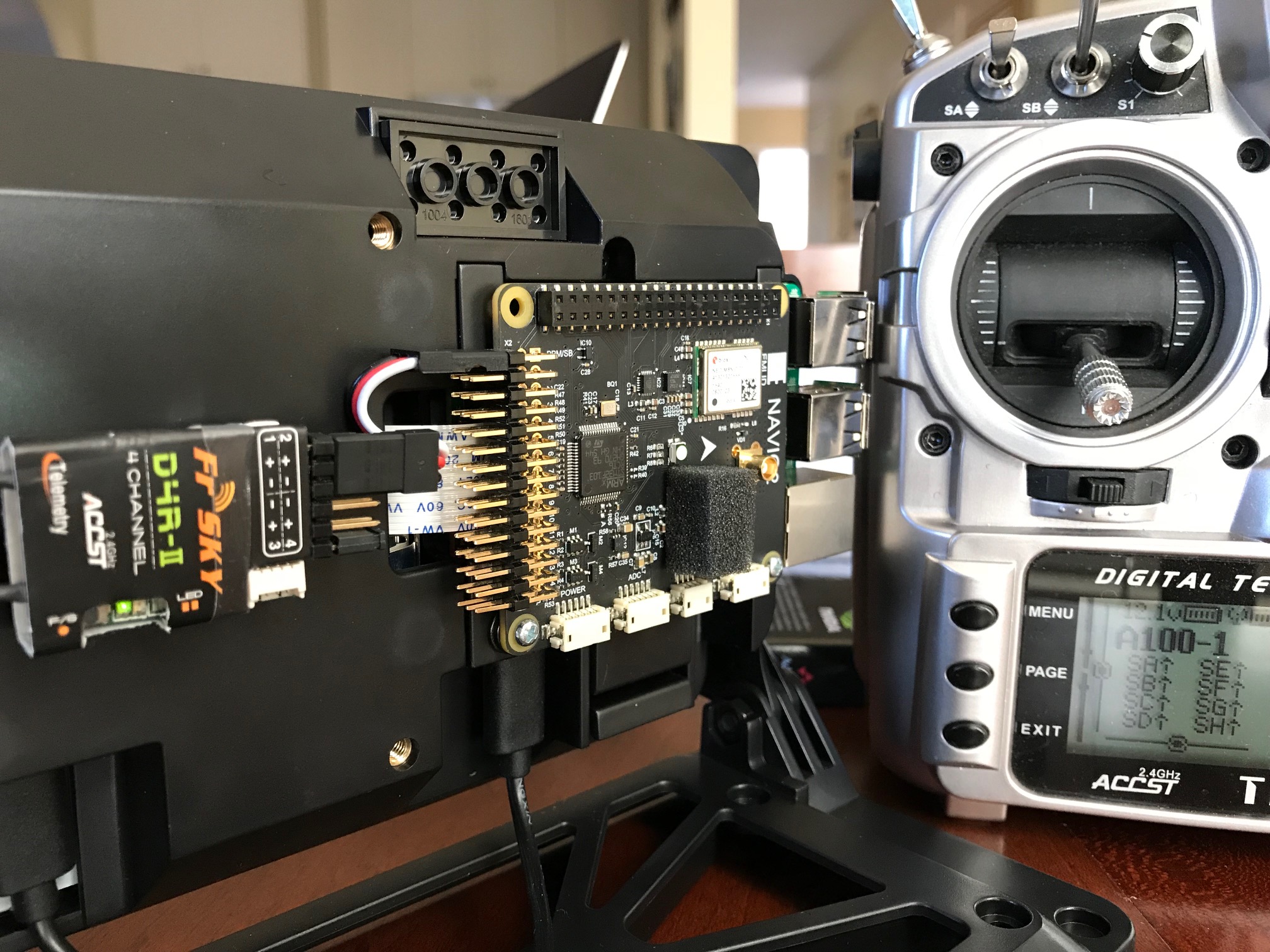
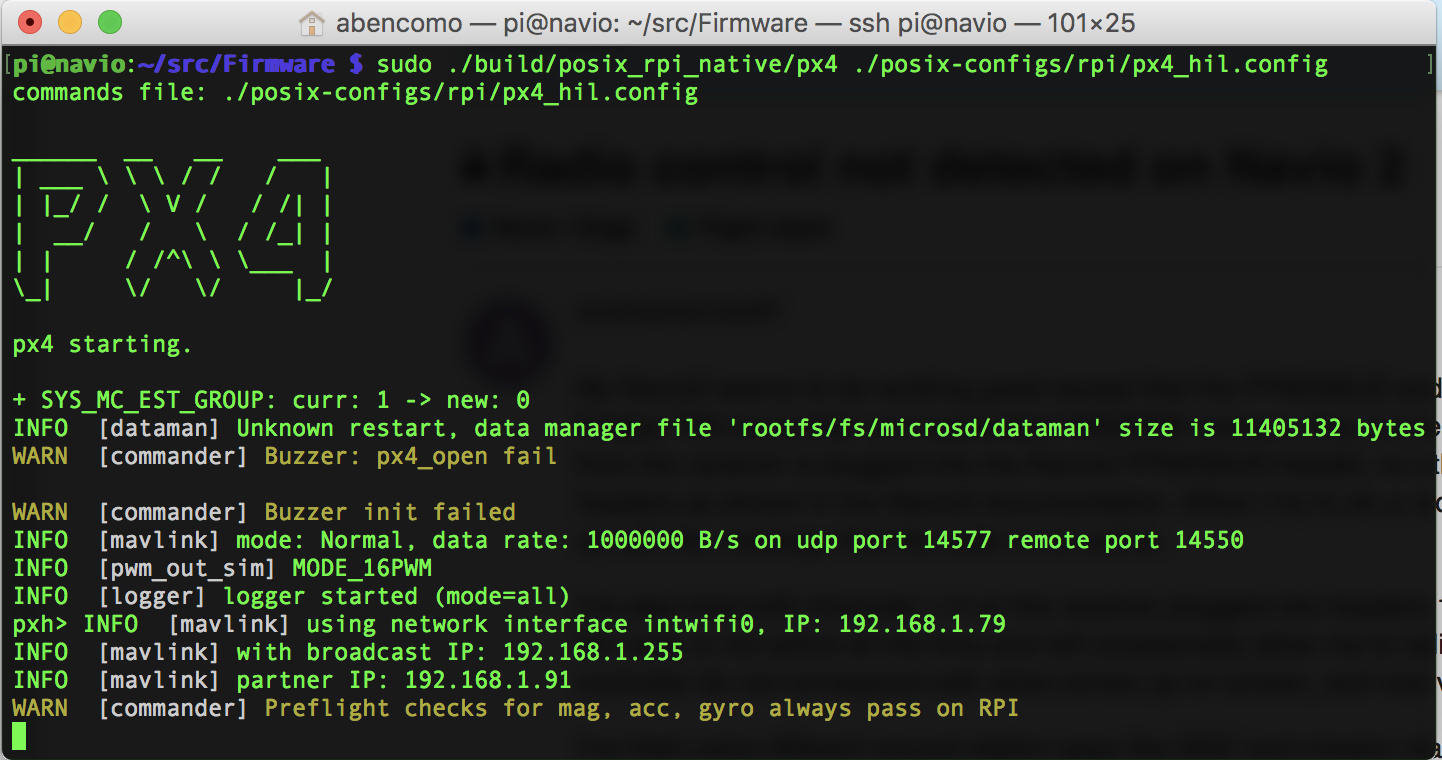
I’m setting up a workbench to do hardware-in-the-loop (HIL) using the Navio2 and PX4 flight stack v1.7.3 release. However, I’m not able to to complete the radio calibrate in QGroundControl since it doesn’t detect the radio channel. I have bound the Taranis transmitter with the D4R-II (receiver led is green) as shown below, but both cat /sys/kernel/rcio/status/alive & cat /sys/kernel/rcio/rcin/ch2 return 0 when I move the throttle stick up and down.
Is the any additional parameter that I need to set in the px4_hil.config file so the px4 can see the rcio values from channel 2?