esa.attia
(Esa Attia)
1
Hi,
I’m currently using a Navio2 board with ardurover 3.1.2.
I can’t seem to get RC_MAP working.
I’m currently trying to map channel RC channel 3 to throttle and RC channel 2 to Yaw in a skid steer (tank style robot).
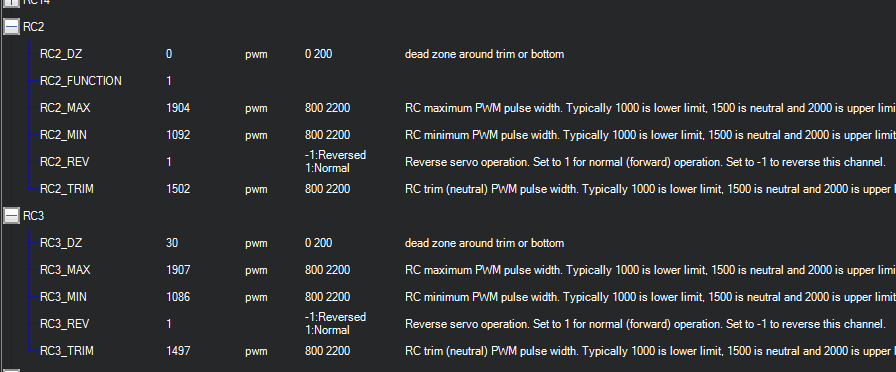
When I monitor the output on mission planner.
When I move channel 2 (yaw) all I see is output channel 2 move. I’m expecting 2 channel to move in a differential manner when I move the Yaw stick.
Also when I move the throttle … I get no movement on any of the output channels
Any help would be great
Cheers
Update to the latest 3.2.0 rc1
It works a LOT better there.
esa.attia
(Esa Attia)
3
How do I upgrade to 3.2.0 rc1 ardu rover code from inside Navio2 ?
is there an apt-get upgrade process?
Can someone show me the steps
and after installing it do I simply run it just like the stable release or is it more fiddly ?
@esa.attia
Could you then share if the issue is solved on newer ArduRover?
system
(system)
Closed
7
This topic was automatically closed after 100 days. New replies are no longer allowed.