vnpathak
September 12, 2019, 8:35pm
1
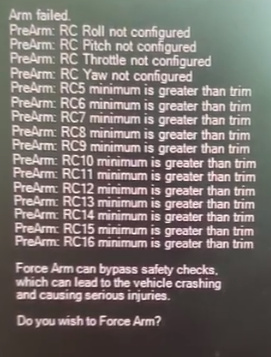
I am unable to Arm as a result of various RC related errors. Anyone know why?
I have Navio on Pi3 with Arducopter v3.6.5 and using joystick as my radio controller.
I am doing these steps:
Power Navio/Pi3 with battery
From Actions > Joystick menu, map channel to controller axis.
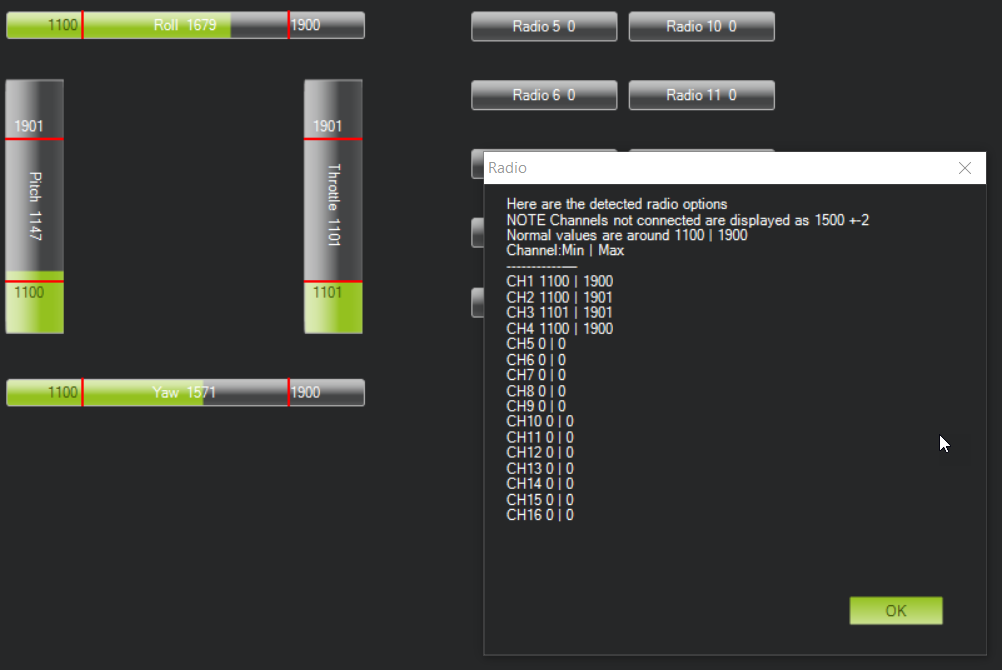
Perform Radio Calibration. Control sweep confirms the channel to controller axis is correct.
Select Arm (Actions > Arm/Disarm)
Pop-up shows issue with all RC channel 1-16.
Thanks in advance for your help.
vnpathak
September 12, 2019, 11:48pm
2
I was able to clear RC5 to RC16 by setting the RCx_TRIM parameter equal to RCx_MIN in MissionPlanner (Config/Tuning > Full Parameter List).
But RC1_TRIM to RC4_TRIM are controlled by joystick so I am unsure how that can corrected.
gleb.gira
September 17, 2019, 1:41pm
4
Hi @vnpathak ,
What joystick model do you have?
Can you please try to manually change RC1_MIN to 1101 and RC1_MAX to 1901 (and then repeat for RC2_, RC3_ and RC4_ max/min parameters)?
vnpathak
September 22, 2019, 10:16pm
5
Joystick is Logitech Fore3dPro.
With 1101 and 1901 values for RC1-4, it worked just fine. I think the controller is kind of flaky for these cases.
But for RC5-16, as noted, if I set RCx_TRIM to within a valid range as noted in the parameter’s description, things just work fine.
I think Mission Planner is not recognizing that these channels are not connect. I have “None” selected for the given channel in the joystick setup menu. Is there something else I need to do to tell GCS that I am not using those channels?
gleb.gira
September 26, 2019, 5:59pm
6
Hi @vnpathak ,
I think you can try RCMAP feature to disable these channels in Mission Planner. I’d recommend checking Ardupilot docs for more related info.
system
January 8, 2020, 9:25am
8
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.