I was wondering if you could help me with my issue, so I have the same transmitter and receiver as you and i also purchased a PPM encoder. (https://www.amazon.com/gp/product/B019V59KCS/ref=ppx_yo_dt_b_asin_title_o02_s00?ie=UTF8&psc=1) the system seems to be working well but when I run mission planner and try to calibrate the radio it displays 16 RC channels and only calibrates RC 1-9 and RC 10-16 do not calibrate. The other issue is that i don’t think it sees those channels since it doesn’t show a green bar it has them in a grey color. Then when I try to arm the quad copter the mission planner displays a Prearm: 16 error.
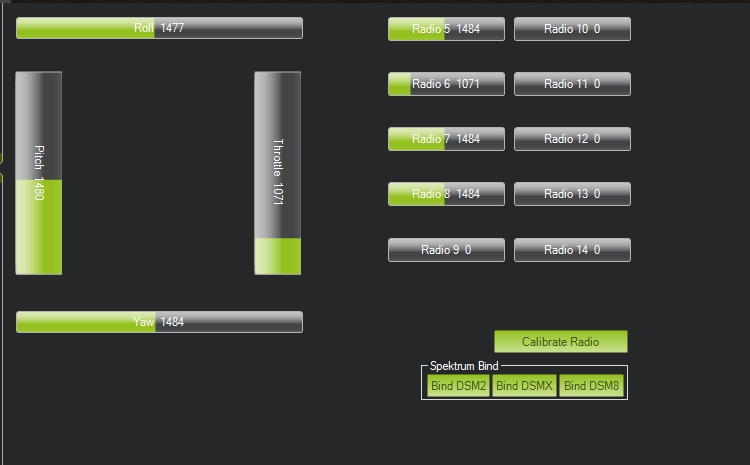
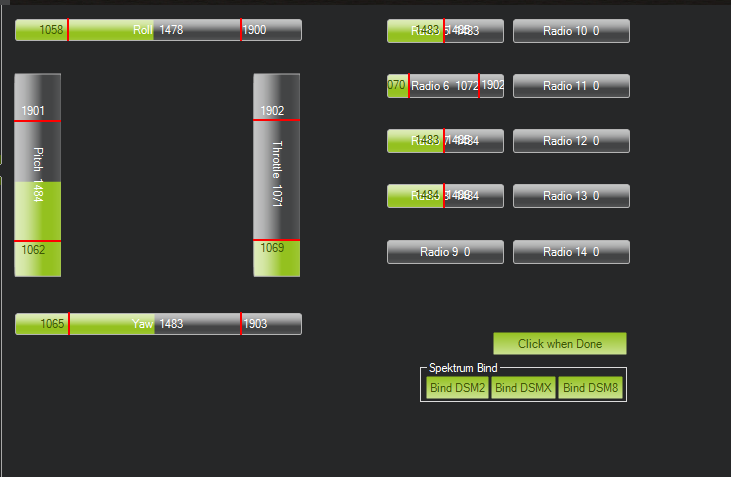
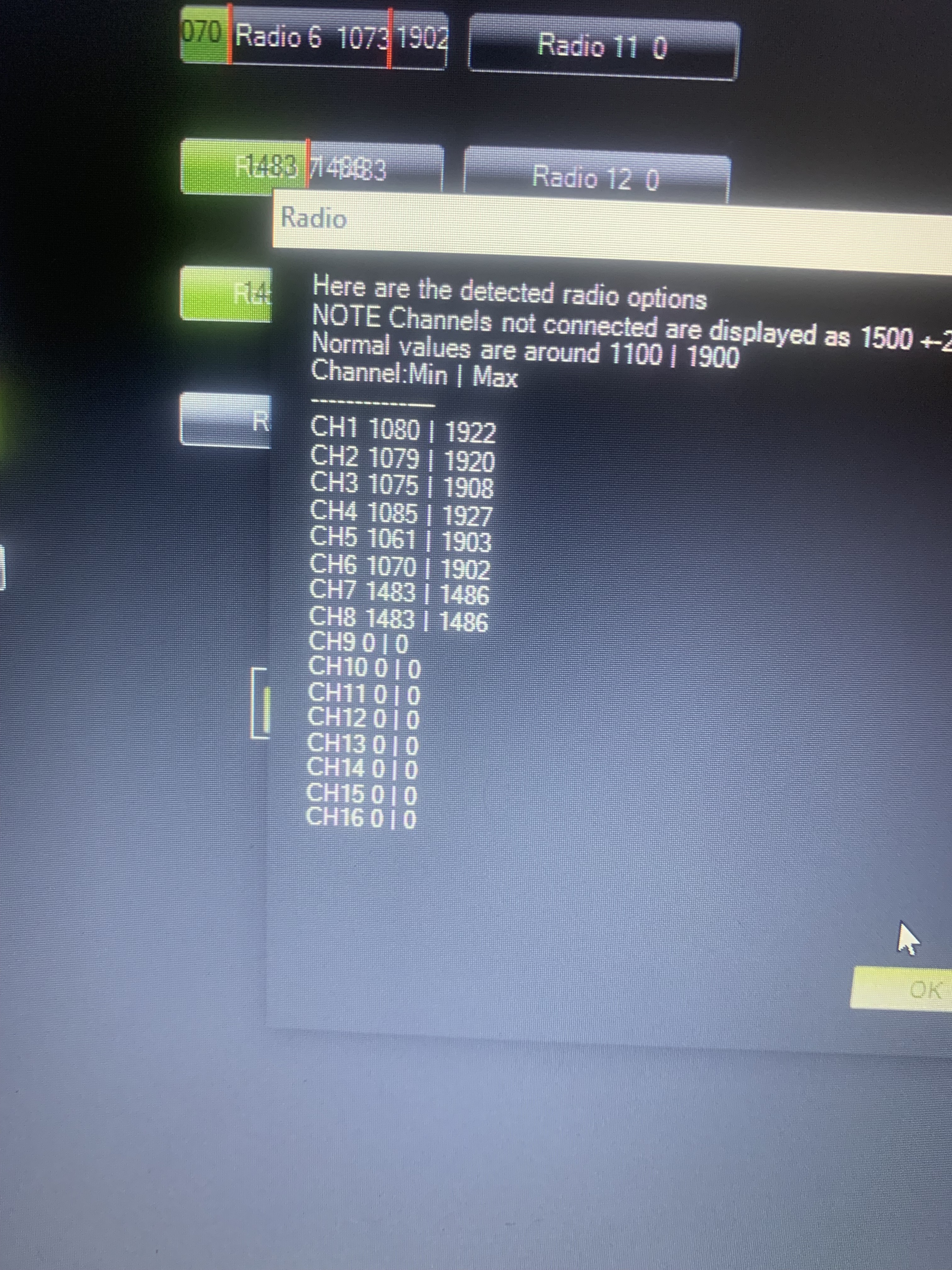
This is what I see and what I am able to calibrate once I am running the calibration. Once I end the calibration channels 1-8 will say a number between 1000 and 2000, while channels 9-16 will have a value of 0.
I tired setting the RCxTrim parameters to 1500 since at the end of the calibration it says channels not connected auto set to 1500 but that didnt help ether.