



Just wanted to say I’m very interested in your work and I’m one of those guys using analogue over wifi any day of the week for video =)
Why not include both type of frames?
the best approach is the one you are suggesting.
My main concern now is to complete a first alpha version and give it to public.
Developing a circular frame for gimbals is a bit tricky and completely changes the sub-framework.
to give you a “small” cheese …there is a free way to move data ~6.5 Mbit enough to transfer MAVlink data to ground station.
Then it’s easy, rectangle frame first then circular when time allows it 
1 Like
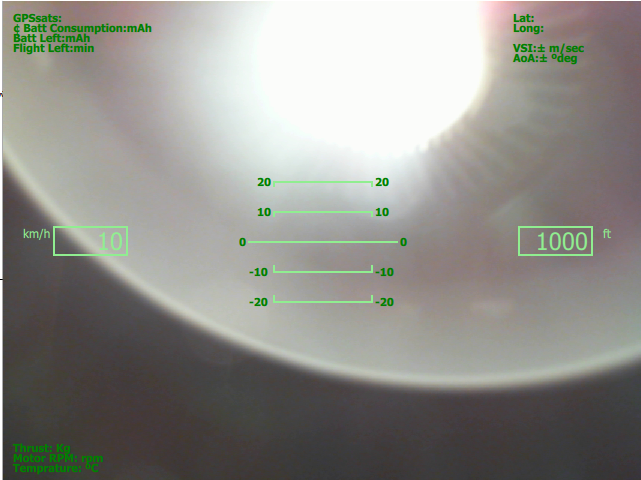
Here is the progress of the development so far and the ToDo list:
Create Camera Frame:ok
Connect with Camera:ok
Enable Antialising for all objects:ok
Establish frame of the gimbals:
Create Gimbals :ok
Animate Gimbals :ok
Smooth Animation :ok
Design side-slip animation: ok
Roll over the gimbals : TO DO
Create Thrust level (rc channel Position) : To Do
Create Meters/Bars Batt,RSSIs etc: To Do
Create Trust Meter (Instant Real Time Thrust Produced) : To Do
Create Compass: To Do
Create Roll Over of Compass : To Do
Create Side Alt Meter : To Do
Create Side Speed Meter : To Do
G Force Meter : To Do
GPS Position. : To Do
Display Google Maps (Transparently) with position indication: To Do
Future Enhancements
ILS
3D Landing Patterns
Stream Data To Ground Station without using WiFi or 3G,4G etc.
More to come tomorrow evening…
3 Likes
1 Like
I like it.
The map is a very nice touch!
Justin
Here is the progress of the development so far and the ToDo list:
Create Camera Frame:ok
Connect with Camera:ok
Enable Antialising for all objects:ok
Establish frame of the gimbals:
Create Gimbals :ok
Animate Gimbals :ok
Smooth Animation :ok
Design side-slip animation: ok
Roll over the gimbals : ok
Create Thrust level (rc channel Position) : To Do
Create Meters/Bars Batt,RSSIs etc: To Do
Create Trust Meter (Instant Real Time Thrust Produced) : To Do
Create Compass: ok
Create Roll Over of Compass : To Do
Create Side Alt Meter : ok
Create Side Speed Meter : ok
G Force Meter : To Do
GPS Position. : ok
Display Google Maps (Transparently) with position indication: ok
Future Enhancements
ILS
3D Landing Patterns
Stream Data To Ground Station without using WiFi or 3G,4G etc.
@Thanatos looks really good:) keep up the good work!
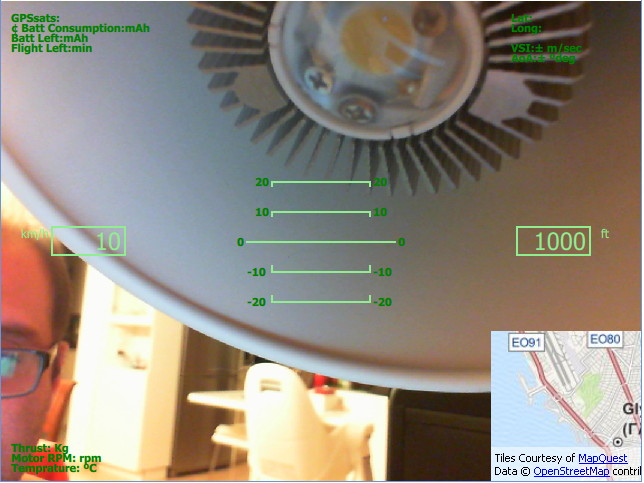
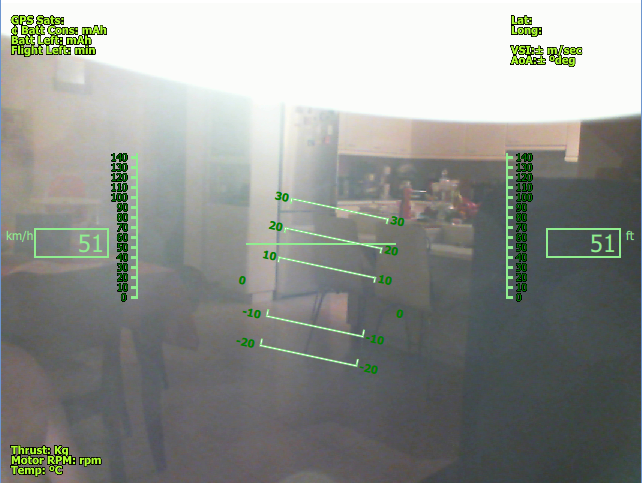
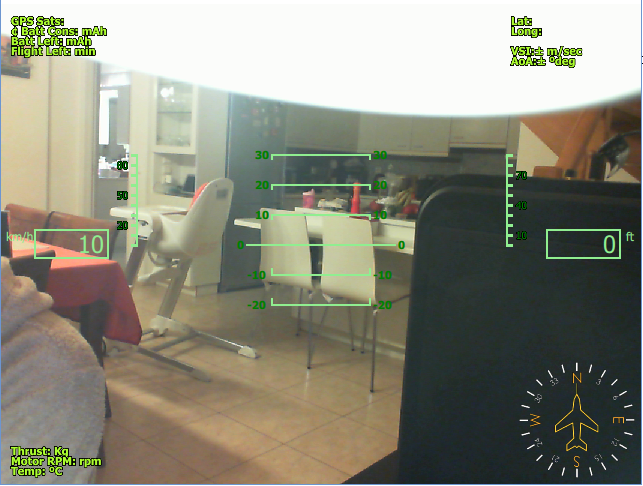
With MAP on:
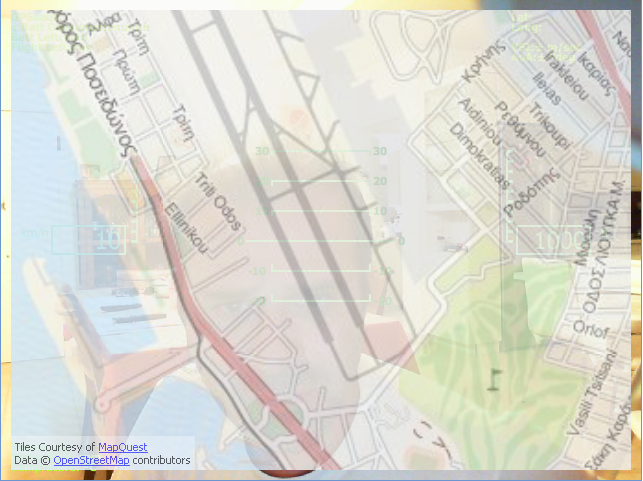
and MAP off:
during flight…so you will not have to take you eyes of the googles or Video view.
1 Like
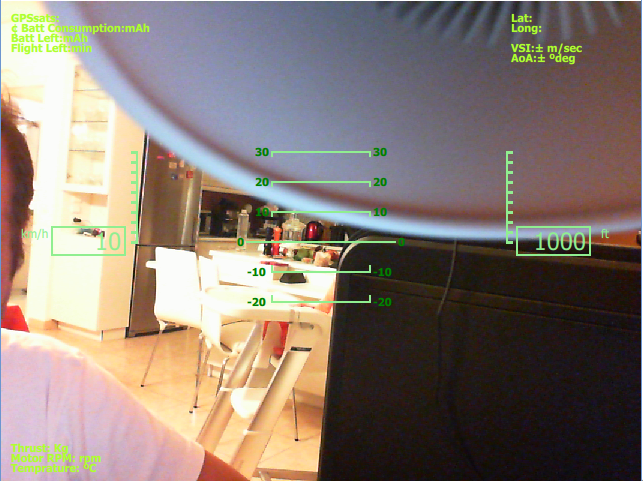
Here is the progress of the development so far and the ToDo list:
Create Camera Frame:ok
Connect with Camera:ok
Enable Antialising for all objects:ok
Establish frame of the gimbals:
Create Gimbals :ok
Animate Gimbals :ok
Smooth Animation :ok
Design side-slip animation: ok
Roll over the gimbals : ok
Create Thrust level (rc channel Position) : To Do
Create Meters/Bars Batt,RSSIs etc: To Do
Create Trust Meter (Instant Real Time Thrust Produced) : To Do
Create Compass: ok
Create Roll Over of Compass : ok pending design and artistic touch
Create Side Alt Meter : ok
new Create Side Slide Alt Meter:ok
Create Side Speed Meter : ok
new Create Side Slide Speed Meter: ok
G Force Meter : To Do
GPS Position. : ok
Display Google Maps (Transparently) with position indication: ok
Display Google Maps (Transparently) with position indication overlapping the window (hidden) : ok
Future Enhancements
ILS
3D Landing Patterns
Stream Data To Ground Station without using WiFi or 3G,4G etc.
2 Likes
Amazing progress!
Transparent map was a surprise, no idea this could be done.
Your graphics are very clean, not cluttered like some OSDs.
Thank you for your hard work!
Justin
yeap…
anti-aliasing does miracles with smoothness.
Also be informed that all the shapes and letters in the softOSD is pure graphics and not characters from from matrix table.
More to come today with compass and side sliders.
G.
minor addition to the fonts. Black outline to be more visible is a very sunny environment.
2 Likes
Today I will upload a screenshot with compass completed and fully animated.
While dealing with some problems of compass and correcting its rotation…an Idea came to my mind.
Since I have made a map overlay …why I don’t make another page to display MAVLINK DATA ?.
If you have the data displayed maybe … I say maybe there is no need for those data to be sent to ground station …only for log reasons …so the link to ground station can go down the drain…I say maybe.
What Data do you prefer or you want more to be displayed ?
2 Likes
Maybe battery voltage?
Thanatos,
really good, can you provide more details about the hardware connections ?
and its posible to use with other câmeras ?
put any camera you like in the RaspPi (USB).
If you have sensors in your setup(Amper Sendors, Voltage etc) values will be displayed
the OSD will be software running in your Raspberry Pi and the output will be taken from the Composite output of the Pi.
Then next step is to sent this output to the transmiter for video transfer to the Ground.
Camera must be USB and be able to provide Live Feed …
nothing more
2 Likes
Very nice, looking forward to test it, Thank you