I have a DJI Phaton 4 and want to be able to lay down my own GCPs without having to pay a Land Surveyor. I understand this can be done economically with two Reach RS devices. However you still at least need one pre-established control point, monument or point from a pre-existing survey for the “base” unit. Here’s my basic questions:
(a) How long does it take the second unit (I guess this is called the “Rover”) to establish the coordinates?
(b) What is the transmission range - how far away can the Rover be from the base unit?
(c) I’m in the USA. Is there some network I can subscribe to that one (1) eliminates the need for two units and (2) eliminate the need of a pre-established control point? Where do I go to sign up for the network and do I need additional software? (There is a competing product from Propeller called Aeropint that are just pads you lay down but they have a network subscription so essentially they are just a bunch of Reach RS units I guess in the form of a GCP pad you lay on the ground.) You have to buy 10 of them for $6K USD!
(d) If I upgrade my drone to one that I can install a rover unit on the drone itself for PPK, can I use it with the Reach RS as a base or do I need to move up to something else?
a) between five minutes and five hours depending on the accuracy you need.
b) I have succesfully received reach RS corrections over 4.5 km, cannot speak for any longer distances
2) Depends state by state and whether you want RTK or PPK
d) Yes, still need to get timing of photos to link to PPL data.
there are two methods.
i) My reach to P4 timing chip/cable
ii) Use Pix4D capture in safe mode and tie the log to the images
IN both cases you need to tie the PPK data to the images. I have scripts for that.
Simon
Hi I have previously been adverse to (afraid of) post processing for GCPs but this week I decided to give it a serious shot. I am super impressed. It’s not as much fun because you don’t use the reachview survey feature. All you do is set up your pole for a few minutes over each gcp and then log there for a few minutes. It’s easiest to just turn logging on while you have your pole positioned and then turn it off after five or ten minutes. Download it to your computer, post process it against a file downloaded from an official network (many times free) and you have highly accurate absolutely positioned ground control point coordinates. It’s really not terribly hard.
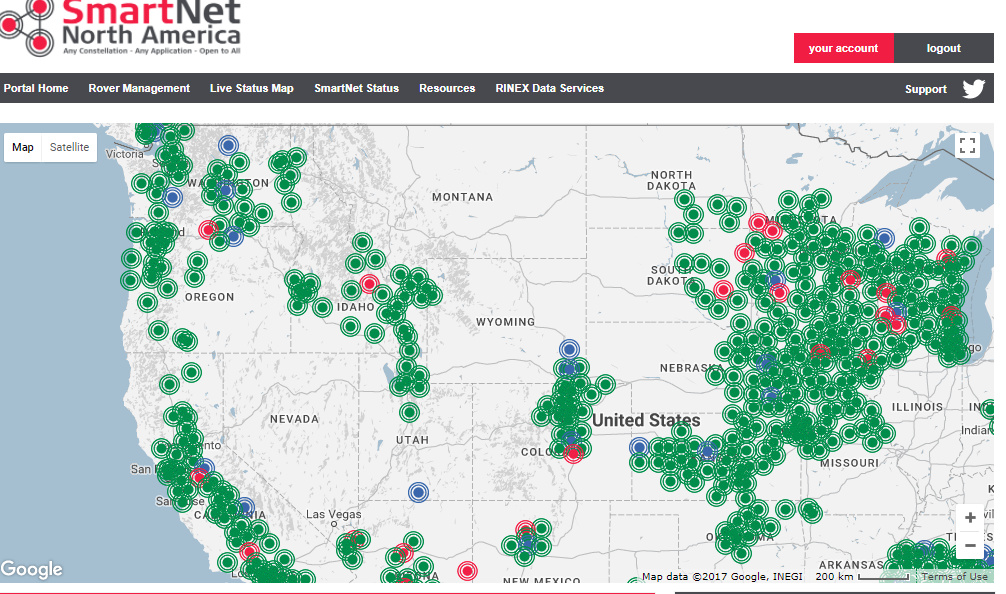
There is the CORS system in the US. You’ll need 3dr radios to RX & TX via RTCM3 which should give you RTK as i understand it.
I am looking to achieve this myself with the Inspire 1 Pro units.
Actually easier with pixhawk type UAV’s.
Thanks for the quick replies. This of course prompts additional questions.
Per Simon_Allen,
What’s the estimated time to get accuracy to within about 10 cm (1 dm)?
Regarding RTK versus PPK, all I’m trying to do is get ground control point absolute location corrdinate accuracy to within 10 cm XY and 30 cm elevation for 5-10 ground ground points. So whatever is easiest and/or cheapest would be the route I would take. Hasn’t Emlid or someone put together training materials with step by step instructions for various methods?
Brent_W, what kind of location accuracy are you getting turning the pole on for 5-10 minutes? Can you offer or point me towards more detailed info on the post process steps to correct it against an “official network” - I assume this is the PPK method and I’m guessing that’s the quicker/easier way as opposed to the RTK method?
I would be working primarily in the Western States (Washington, Oregon, California, and Nevada).
I guess the other question is, what is the major advantage(s) of using the 2-unit method, setting the base on a pre-existing monument as opposed to just using one unit and the PPK method? Speed and or accuracy? If so how much better?
I was getting a fixed solution that showed under a cm of variance. I half-heartedly tested it against a control point that I had measured a few days earlier(for about two minutes). At that time, I surveyed multiple points within “Reachview” and then shifted my entire survey over after measuring this control point.
This time I measured this point again for two minutes but I know my pole wasn’t quite straight. In any case, it was within about two cm of the measurement from the previous day. This time, instead of measuring a bunch of points, I logged on about 7 control points. Each one showed a strong fixed solution with under a cm of variance for most of the 3 minutes.I did the first couple for 7 minutes and they were the same.
I download a file with obs. data from their website and post process each point against it. I will do a more detailed tutorial outlining each step once I feel like I have it fine tuned. There is good info under docs as well.
The data is not free real time but by the next day they make it freely available.This is the only free service I know of in western Canada, where I’m located.
For post processing you can be located much further from where you’re surveying than for rtk. (Baselines can be much longer)
In my opinion, post - processing wouldn’t be very practical for large surveys (it would take a lot more time and you can’t name each point) This is where it would be more practical to have a base station on site and then just post process its position and shift all your points saved on your rover over by the same amount. Remember to take note of the coordinates you used for the inital survey.
In the RTK procedure, with a Reach RS acting as a base station on site, you can often keep a fixed solution and just measure withing the Reachview Survey tab for a few seconds on each point. The really handy part is that you can export all points as one survey and then no post-processing is required. This saves a considerable amount of time and confusion.
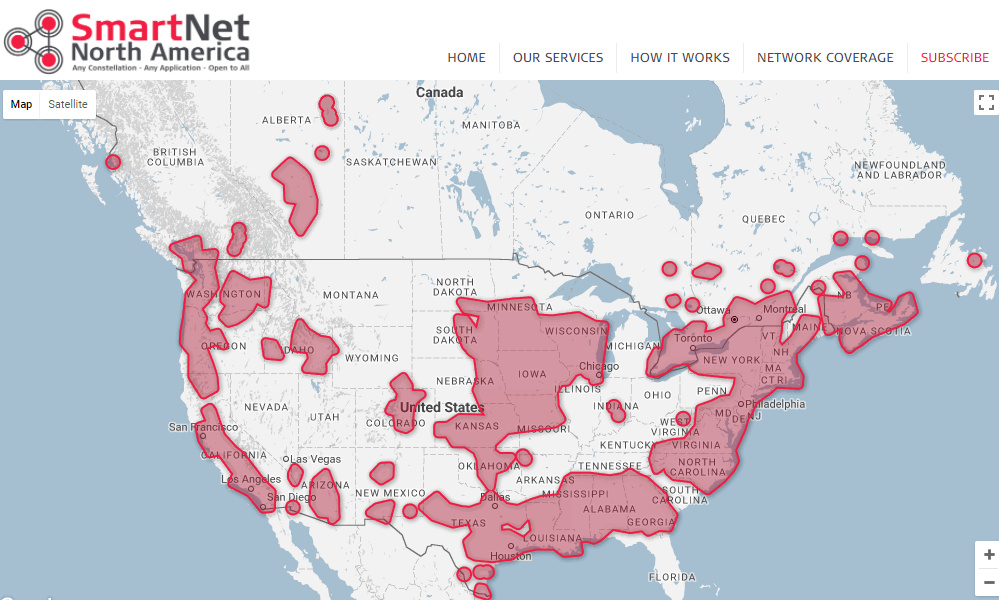
Great info. Unfortunately one of the jobs I would use this for is not in the coverage area as it’s in a rural area of California. I Googled ‘CORS subscription’ and I see there’s lots of others (albeit probably for a fee), including this one which claims 100% coverage of the US. http://hprtk.net/subscribe/ They came up first so I would assume they are one of the major providers. But $1,800/yr is a bit steep for me as I would need to use this very seldom.
@Brent_W did a fantastic job of answering your questions. I would add a few points.
PPK works for GCPs IF, IF, IF you already are confident in the way you collect data and achieve good results. I.e you know what to look for in terms of thing that can create a poor solution. Otherwise you do run the risk of having nothing to show for a day in the field but a healthy glow and tall stories. Collect some data in a practise environment making everything as near as perfect as you can. process it, degrade the environment, repeat, see what are the real killers and therefore what to avoid.
I typically occupy a location for 5-10 minutes because I don’t have the info (in real time) to know all has gone well therefore the more data I have, the more chance I have of a good solution. It typically takes 5-10 mins (from cold) to achieve fix and 1-2 minutes to re-achieve fix after walking under trees, or through an urban canyon. The 5-10 minutes is for using a reference station within 10km. 20-30min up to 30km (5cm) and the next step is big 5-24 hours for anything further away and process your data using multiple reference stations to compare and hopefully prove the results.
You can achieve PPK with two Reach RTK units (this was how it was done in the old days before the Reach RS), just use one as base.
4Ensure you PPK in static mode you really are helping the processing by letting the algorithms know you are not moving.
I tend to run logging the whole time and then (from the times in my notebook) use the RTKpost start and end times to process only the data for an occupation. The advantage (as I see it) of this approach is that should your 5-10 min occupation not deliver a good solution (because you missed the large tree over your head or similar) YOU can extend the window earlier and potentially get a fixed solution (in kinematic mode) prior to going into a less optimal location and sometimes once a good solution is achieved RTKLIB can keep working that solution and keep a good fix. but starting in a poor location doesn’t give this option.
30cm Elevation!!! This is an issue. There is a reason most survey monopods are 2m long (mine is 1.848m long, it is a good sturdy $20 photography monopod rather than a $200 survey monopod) with a good ground plane. to reduce multipath. Mounting at 30cm you are going to a) shield a portion of the sky while placing it b) be prone to multipath reflections from any object that the antenna can ‘see’ over the brim of the ground plane. multipath reflections destroy RTK/PPK.
I’m guessing you may have misunderstood my reference to 30cm? I was just saying that the elevation data for the points in the point cloud I will be generating using drone images and photogrammetry need to be accurate to within 30cm of actual elevation. Maybe I’m the one misunderstanding, but I don’t think that should have to do with the length of the pole the Reach RS is mounted on.
It is quite possible that I only need one GCP to get my absolute geo positioning data to be within 30 cm accuracy. I am open to spending a small amount of time and money to insure I get that accuracy by locating 5-10 GCPs on a 700 acre site with lots of elevation change (+/- 250 feet). Plus I may have other jobs with higher accuracy requirements in the near future.
My guess is that one Reach RS unit combined with PPK using CORS might be adequate for my particular application? I just discovered the NOAA CORS website map and luckily there is an active CORS right on site where I need to do a survey in a fairly rural area! (15 sec rate) I just need to find the workflow to show me how for the first time I take the coordinates from the Reach and correct them using the CORS data.
One thing I’m still wondering is say I’m laying down 10 GCPs and have a pre-existing survey control point to setup a base station on. Does using the two unit method (a base and a rover) save me any significant time as opposed to just using one unit and PPK with CORS data? Or is the two-unit method less prone to error/mistakes?
If you have a known point on site using two units could be more efficient as getting a fix with a closely located base station is faster and more robust. You will also save time by directly collecting points in RTK instead of doing post-processing in the office.