



Hello, everybody.
we are trying to integrate reach to our drones to minimize gcps work in our mapping projects.
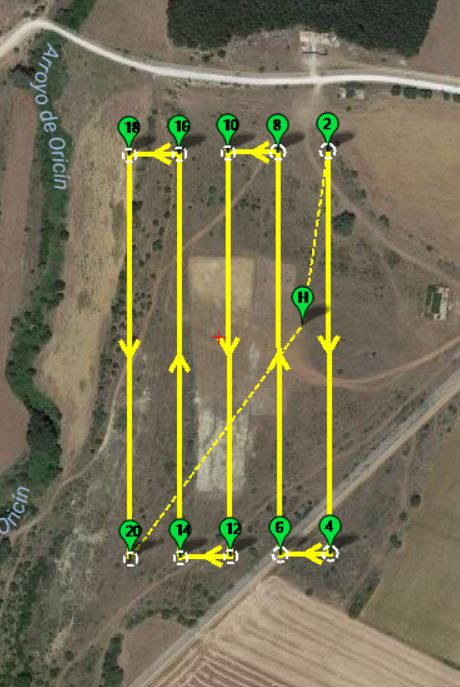
In this case we proposed a test zone in which we would take a matrix of verification points with a reach in survey mode connected to NTRIP (basemount at 18km).
reach at fix and mark 6 ground control points in the flight zone.

Then we would use the same reach of the verification points and we mount it on a tripod in an unknown point, we connect it again to NTRIP until it achieves fix and we activate base mode in AVERAGE FIX (5 min) reach establishes known point and in that moment we activate the logs.
We prepare the drone, Quadcopter with sony nex 5 and 16mm fixed mount lens, carries a reach on board antenna placed in the center of the sensor and captures perfectly the events of the camera, I forget to say that both units have the same configuration: GPS+GLONASS+QZSS 5HZ.
We turn on the quadcopter and plan the flight,
and the reach of the drone also acquires data.
The flight is performed in the planned area with success, we verify images and events in the field and everything perfect 82 images obtained and 82 events captured, is a success!
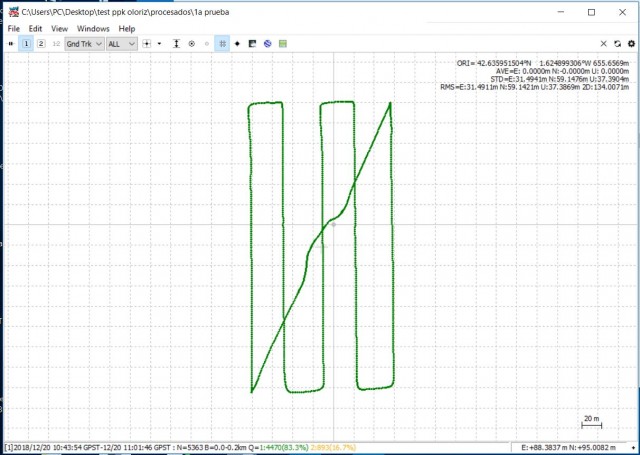
Start the office work, postprocess the base logs and the drone in postprocess options we use the emlid tutorial for PPK postprocess, in base options we select RINEX HEADER POSITION.
and we get fix on the whole flight! Sounds good.
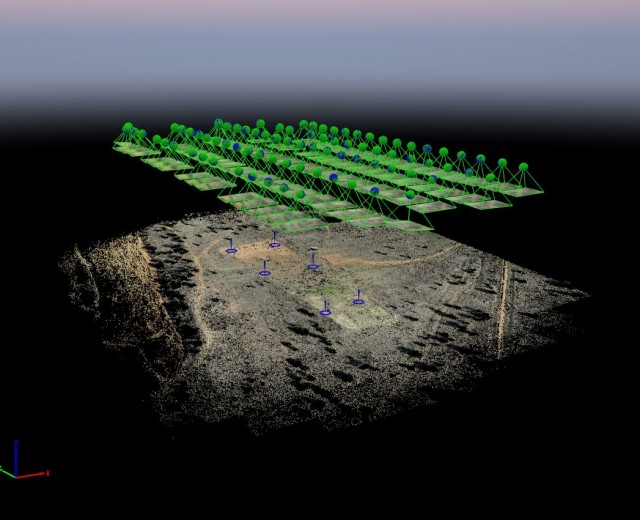
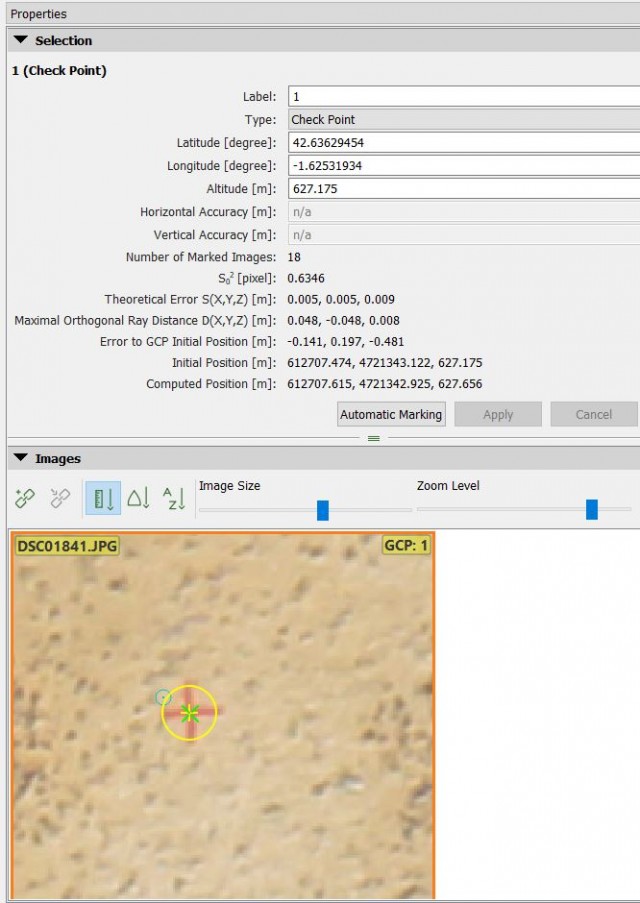
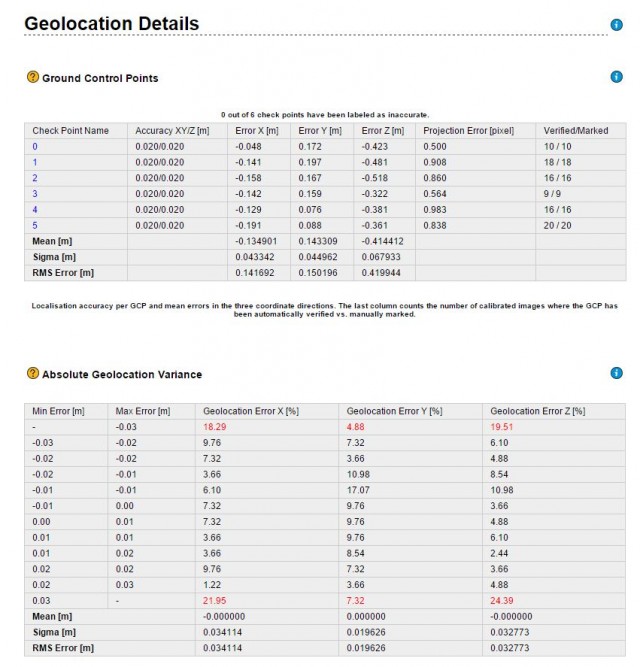
We extract the events from the camera and begin to process the images in Pix4D, we also adjust the accuracy of the labels to 0.02m.
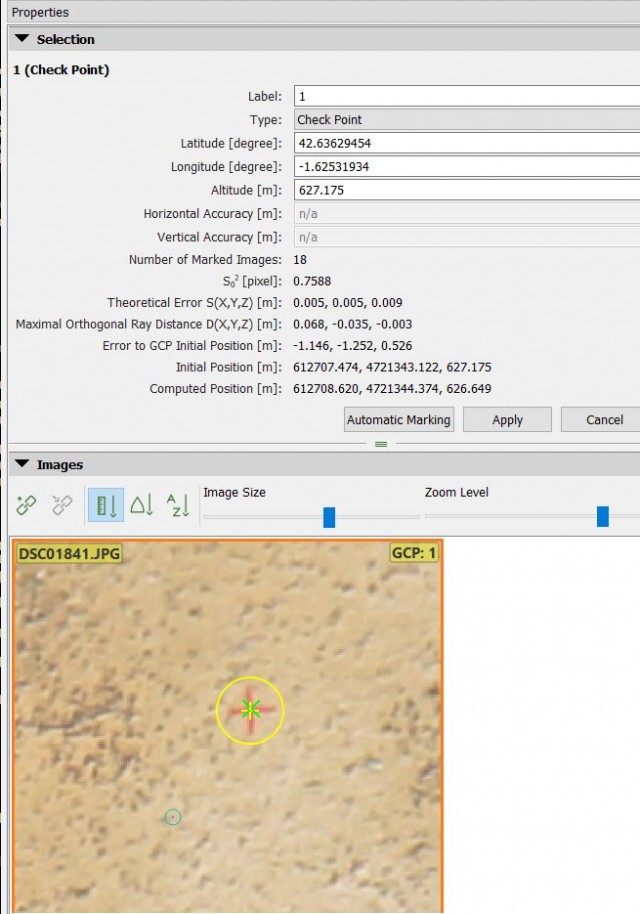
We imported the verification points and here begins our surprise, apparently the position of the GCPS differs a lot compared to other projects that other emlid users have published here.
we don’t like the results, so we keep researching, downloading rinex data from our reference station and processing everything omitting the logs from our own database,
surprise! The results are much better and taking into account that our base is 18km away.
Finally we have been “happy” because we have obtained
very good results taking into account that our base is 18km, but we would like to get better results with our own base.
Any idea what we’re doing wrong?
I’ve put all the files in the cloud, in case someone wants to experiment with them and give us a hand.
https://drive.google.com/drive/folders/1gFisnAPu6Qyi-XvQO2beJgUcrJzMRkmO?usp=sharing
