According to base station setup documentation (https://emlid.com/setting_up_the_base/), with NTRIP correction signal from another public GNSS station, base station can self-compute its positon and achieve centimeter accuracy or sub-meter accuracy depending on how far away from the public GNSS station.
A few questions:
Is there a guideline on the distance limit between my base station and the public station to set up base station with centimeter accuracy?
Since the base station need NTRIP correction to determine its own coordinate, how to set up base station with centimeter accuracy when there’s no public GNSS station nearby?
How to tell NTRIP correction from another base station also has centimeter accuracy? If the other base station only has meter-level accuracy , then does it mean my base station will also have meter-level accuracy rather than centimeter accuracy?
For more details, I’m using Reach RS2 as receiver and Reach M2 as base station.
Emlid’s dual frequency receivers work with a baseline in RTK of up to 60km, having an estimated horizontal accuracy of 7mm + 1ppm and vertical accuracy of 14mm + 1ppm in this positioning mode.
1ppm means a built-in positioning error of 1mm every kilometer away from the base, in addition to the nominal accuracy of the equipment. With this information you already know how to assess the quality of your base coordinates, according to the project you are going to execute.
In terms of GNSS, the longer the collection time, the better the accuracy. Even on RTK solutions.
In this case, you will have to carry out post-processing. It can be a relative positioning, using raw data from GNSS public stations in relation to the raw data from their base; or it can be an absolute positioning (PPP), simpler to perform.
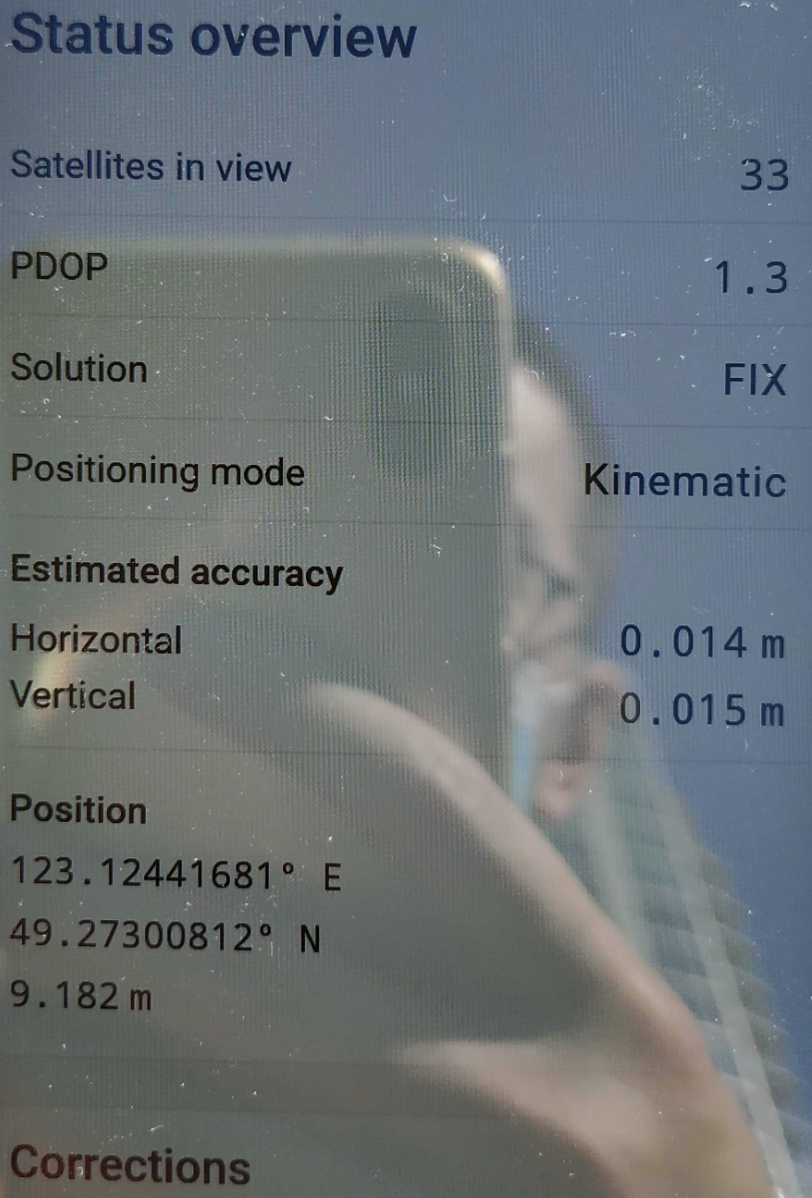
This information is shown on the Status tab. In ReachView3, click on the colored icon in the upper right corner which will show the positioning information.
That statement is correct, that’s the idea. However, the bases coordinates defined by the positioning agencies meet a millimeter quality criterion, precisely to meet the most varied services.
Are you sure the Status tab can tell NTRIP correction from another base station also has centimeter accuracy? From what I read, the accuracy displayed in status tab only tells the estimated accuracy of my base station using RMS error of sampled data points.
GNSS receivers always handle with expected precision in RTK mode. I don’t know any that report the accuracy in this mode.
One way to know if your reading was accurate is to stake-out that point after you’ve collected it. Even so, this accuracy will be in relation to its coordinate used in the base.
I see that Pedro give you a detailed answer. I’d like to add a few words.
Indeed, PPP is a good technique for determining an exact position if an NTRIP station is unavailable in your region. Also, you can set the base to a point with known coordinates, for example, geodetic mark.
If you connect your Reach M2 to a remote base that shifts by meters from global coordinates, Reach’s position will include the same shift. As for an NTRIP station, it’s usually located at a point with known absolute coordinates and have a clear sky view. This allows the remote NTRIP station to transmit accurate data to your receiver.
In short, you can achieve absolute centimeter-level accuracy if you set the base to a point with exact coordinates or connect the rover to an NTRIP reference station.
You’re right. The Estimated accuracy displays only the estimate of the precision of your receiver.
I reread your message about info in the Status tab, and I think I need to add a few words to avoid confusion.
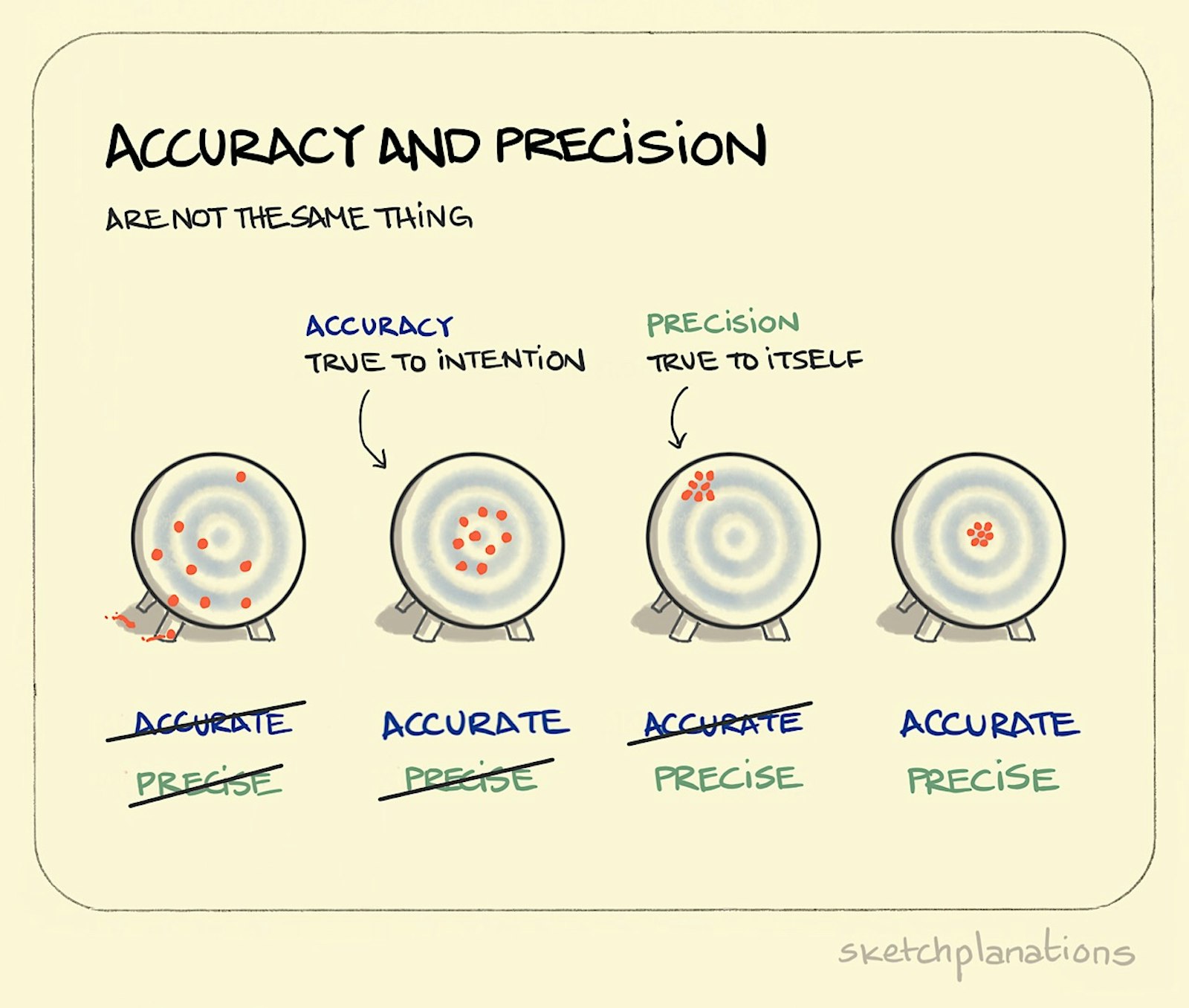
The Estimated accuracy in the Status tab indeed doesn’t say anything about the base position accuracy and refers only to the rover position. That’s why we call it precision, not accuracy. The picture Pedro shared explains the difference.
We took a closer look at the definition of Estimated accuracy and decided to leave it unchanged. Accuracy is a very malleable term. In ReachView 3, we are talking about the internal accuracy of the device. So, the rover position in Fix is centimeter-accurate in relation to the base.