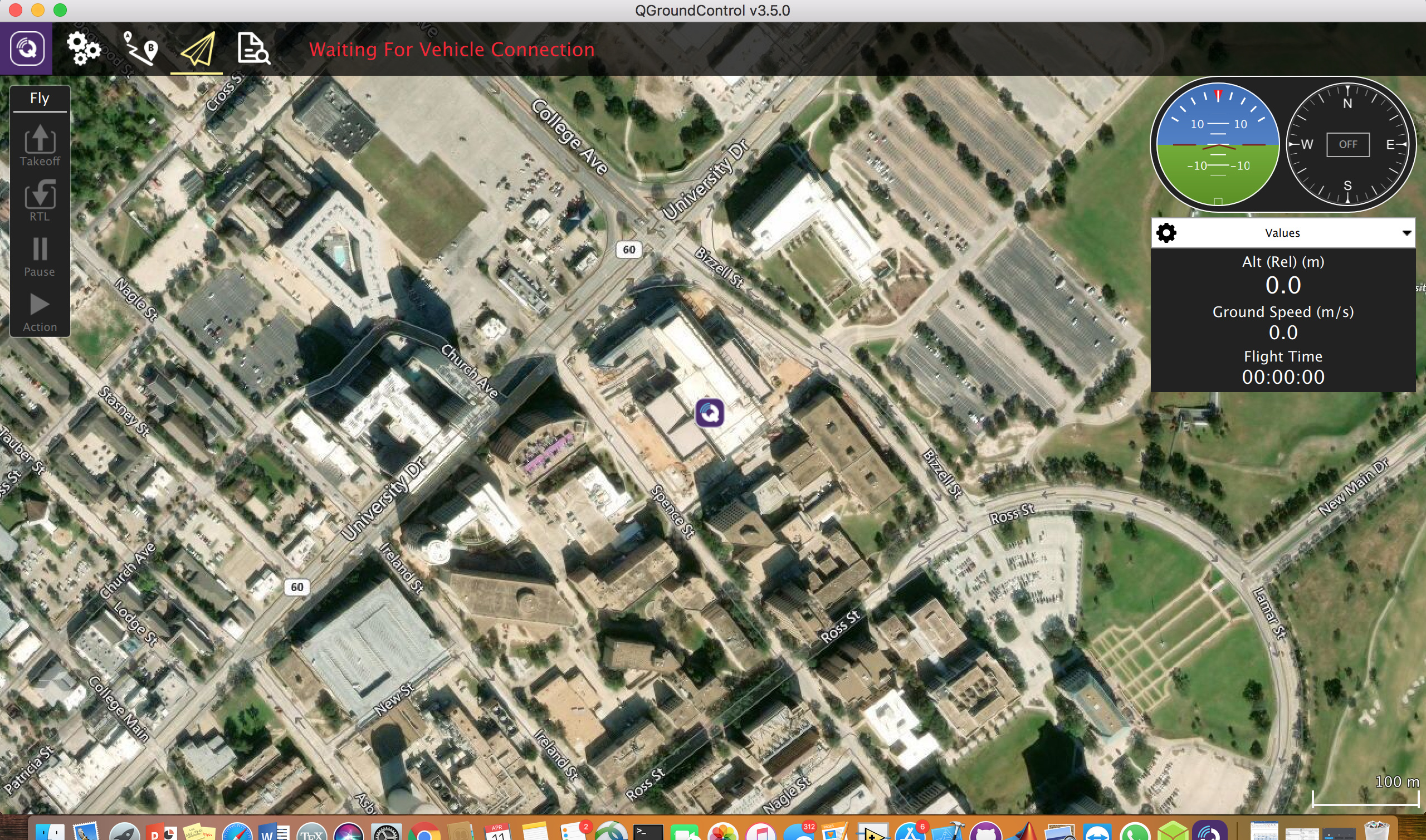
I did TELEM1 ="-A udp:192.168.1.2:14550" and changed it to my ip address. Then I download QGROUNDControl. On Groundcontrol it is saying waiting for vehicle connection.
Not sure what I am doing wrong
I did TELEM1 ="-A udp:192.168.1.2:14550" and changed it to my ip address. Then I download QGROUNDControl. On Groundcontrol it is saying waiting for vehicle connection.
Not sure what I am doing wrong
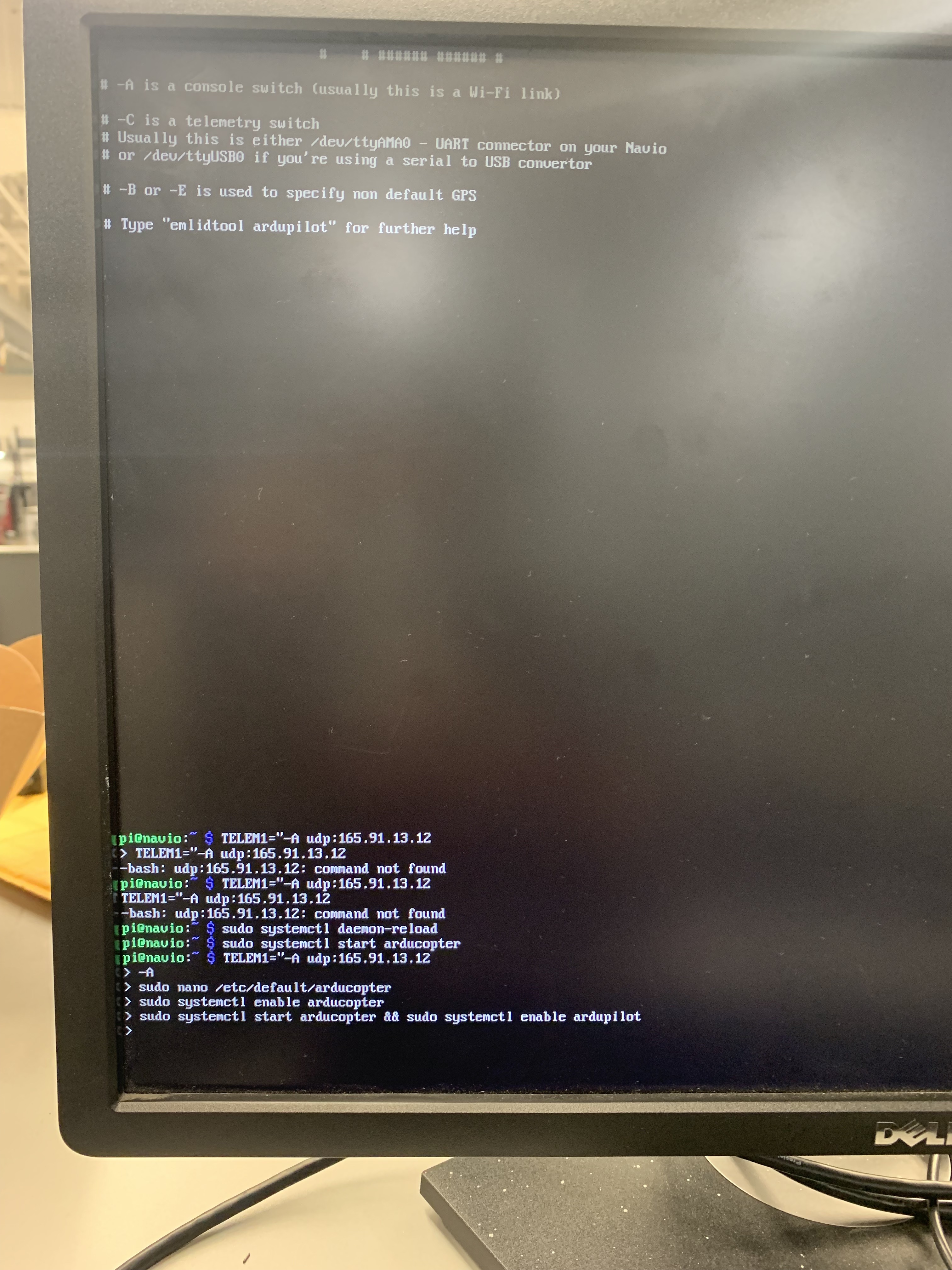
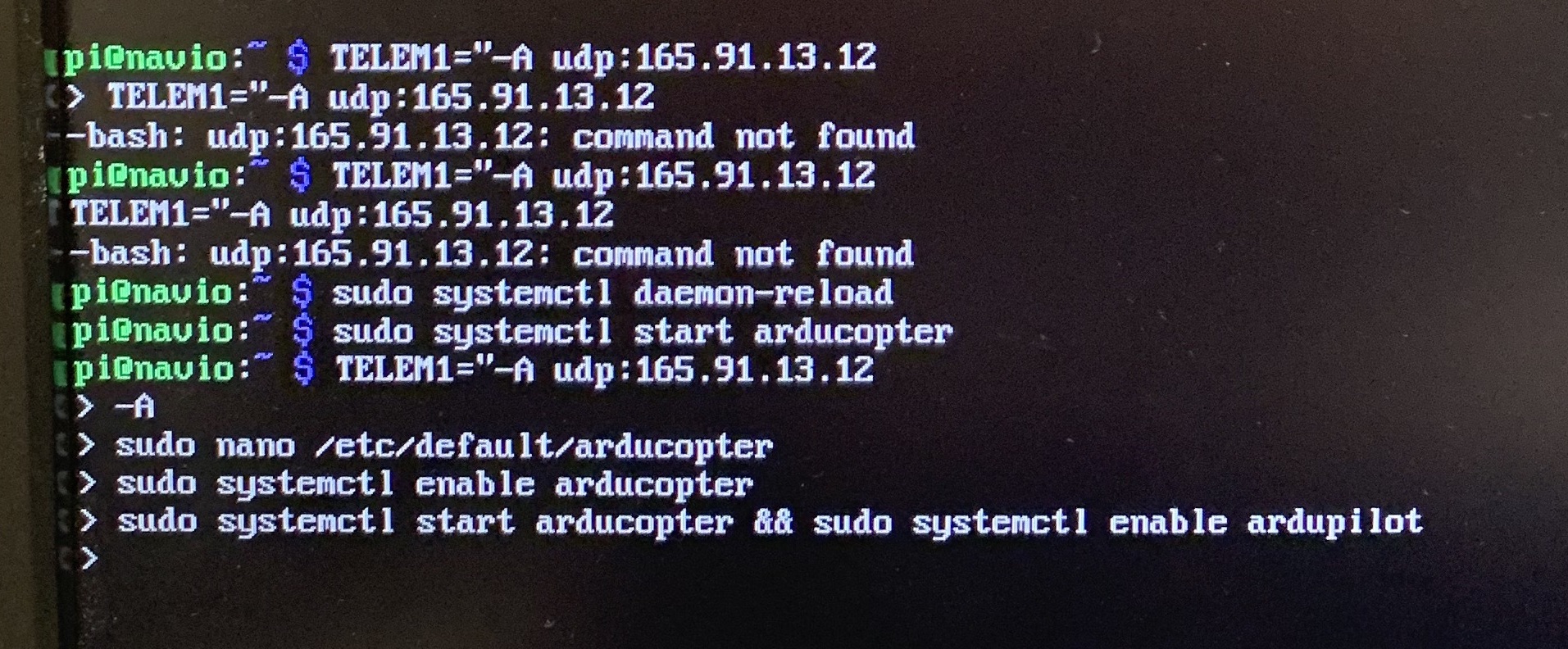
You did nothing like that:
What you have to do is follow the instructions of this link:
https://docs.emlid.com/navio2/common/ardupilot/installation-and-running/#specifying-launching-options
With “nano”, you open and edit the /etc/default/arducopter file
so TELEM1 line will be:
TELEM1=“-A udp:165.91.13.12:14550”
if the IP of the computer running QGroundControl is 165.91.13.12
If you have also a telemetry radio hooked to UART plug, you uncomment line TELEM2,
Save the change, and close the file…
That totally makes sense. I have one more question. Do I have to get telemetry device to talk to connect to my ground station ? Because currently I don’t have one .
Raspberry Wifi range is limited but usable to set parameters or upload mission flight plan at the field.
Some users can use the R/C telemetry to monitor essential parameters.
Since my project is Autonomous Drone. I am not allowed to use a ground station. I am just using it for testing purposes. So can I set parameters in raspberry pi or programme in such a that my drone goes to certain GPS location ?. I need help .
Thank you,
Hassan Baig
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.