Hello, I am new to processing data using Emlid devices.
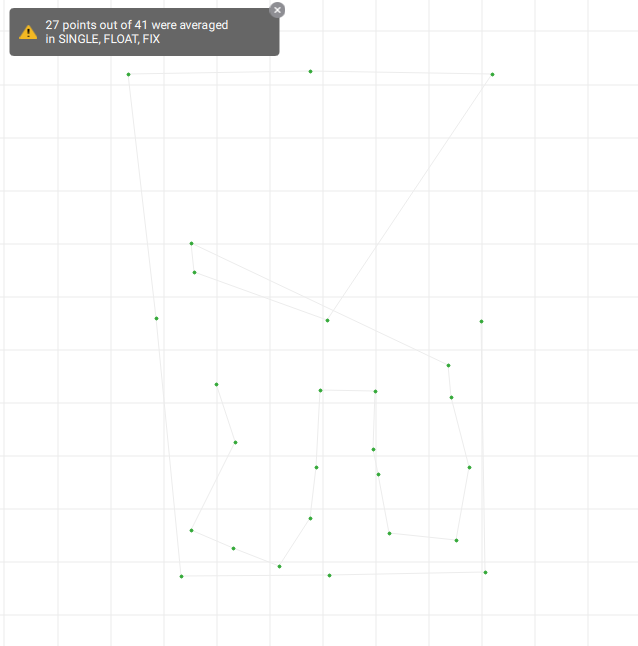
This is what I am struggling with. I am a graduate student looking into the effects of different treatments of the soil on plants. I set up a square survey site by placing three rows of three GCP in an agricultural field, roughly 100m x 100m. Within that grid, I measured the heights of multiple plants to then later compare to the estimated heights I would get from DEMs I would build. When I processed the observation and navigation files of the base station and the navigation file of the rover station through the “stop and go with emlid flow” option in emlid studio, I only got Fixed flags, which is good, but when I imported my project from emlid flow, only 27 out of the 41 points were averaged as fixed, meaning I had a ton of missing information in my corrected csv file. How can I fix this?
(Not sure if the pictures I attached are visible)
One thing you could do it pull up the pos file and cross reference with the time stamps. My guess is on the points it didn’t process that there are enough fixes calculated that you can pull a good coordinate. It probably just has a minimal amount of Float that don’t allow the entire period to average.
Thank you!
That’s one of the ideas I also had in mind.
At points I stood idle with the Rover station while I waited for a colleague to measure the crop, then I would place the rover unit over the crop to get the coordinates. My only worry is that I may have two clusters of points really close to each other where my actual point is.
Perhaps I can look at the uncorrected CSV file to see where the rover unit was more or less.
Again, thanks for the advice.
In your CSV file it shows the averaging time for each of the points. The processed pos file also has time stamps at each calculation and tells you if you are floating or fixed. So, you can be sure you are choosing the right calculations if the solutions you take are within that averaging time on the csv.
There is another thread where I’ve been arguing with Wombo about the meaning of “fix”. Emlid says in some documents that fix means the software thinks there is no carrier phase ambiguity, which I believe means the antenna position is calculated relative to multiple GPS signals including position within each wavelength.
But from looking at the solution data like you have, I don’t believe that’s true, or it could be true but not as relevant to accuracy as people think. I’ve often gotten a tight cluster of “float” points and a scattering of “fix” points. I would just allow the program to give you both float and fix and use both.
Correction, arguing with the entire industry & science. Don’t shoot the messenger taking the time to try and help you in your muddle with some simple basics. Thanks
Well can you explain why the OP found that the same solutions are both “fix” and “float” depending on whether the Flow CSV was being used?
E X A C T L Y
Hi @cg618936,
Welcome to our community!
I see. Some points weren’t corrected at all. It may happen if the observation time in the CSV file and raw data log don’t overlap.
Could you please share the raw data logs and your CSV file with me? I will post-process the logs to see what could be the cause. You can attach an archive with data to the comment, use WeTransfer, or send the files to support@emlid.com.
Hi everyone,
The issue was resolved via email. Such an issue can occur if you collect points instantly without averaging. Since the averaging start and averaging end are the same, Emlid Studio can’t correlate epochs between POS and CSV files.
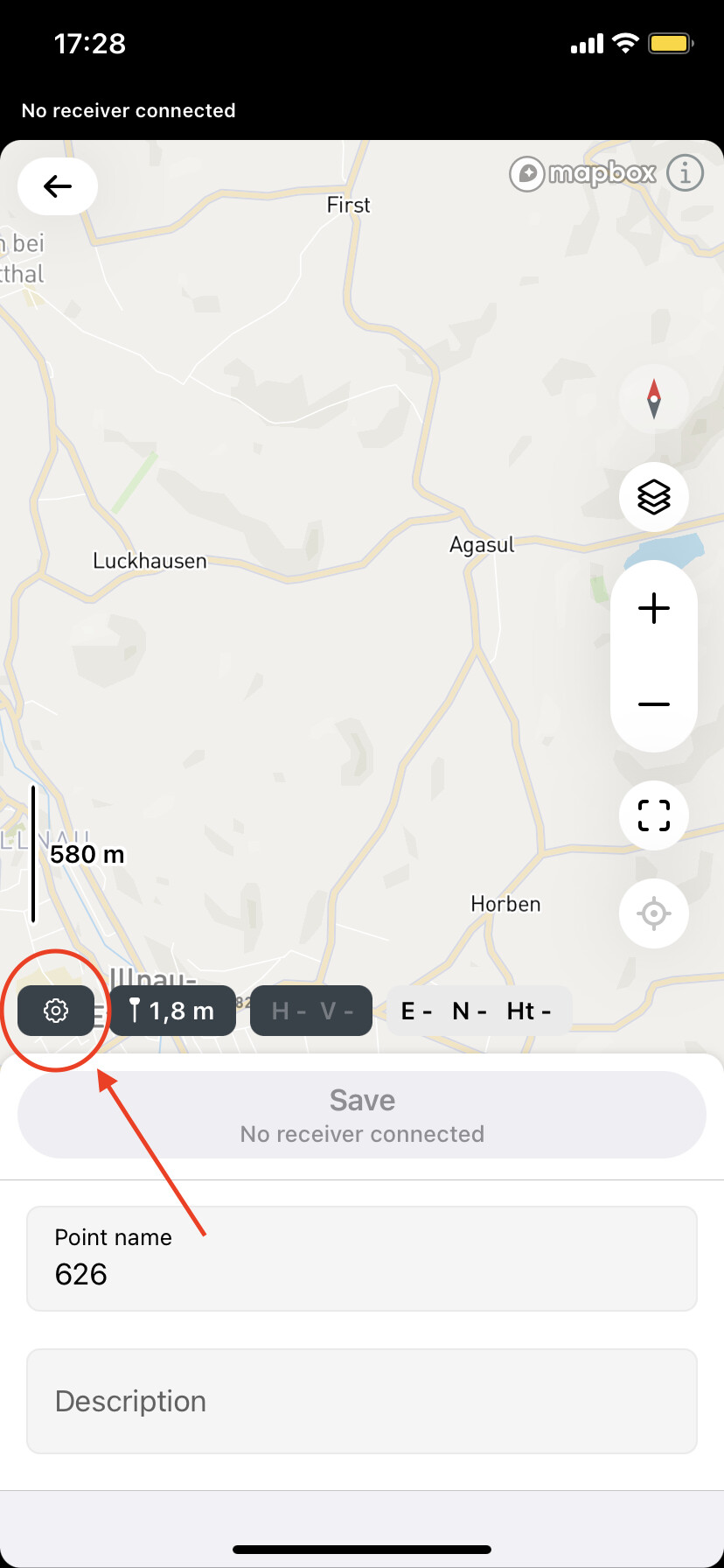
When you collect points in Emlid Flow for Stop&Go mode, please enable the Averaging timer. It can be found in the Survey settings tab.