Dear all,
I read that some people work with Base+Rover when Rover is connected to a GPR system.
We work with this configuration.
We set a base and wait to get a “FIX” connected by NTRIP solution…accuracy is good.
We put the BASE output by LoRa with the antenna.
After that we connect Rover and establish the INPUT correction as LoRa and the output is NMEA to our instruments.
All is fine. We ensure also a direct-of-sight between BASE and ROVER.
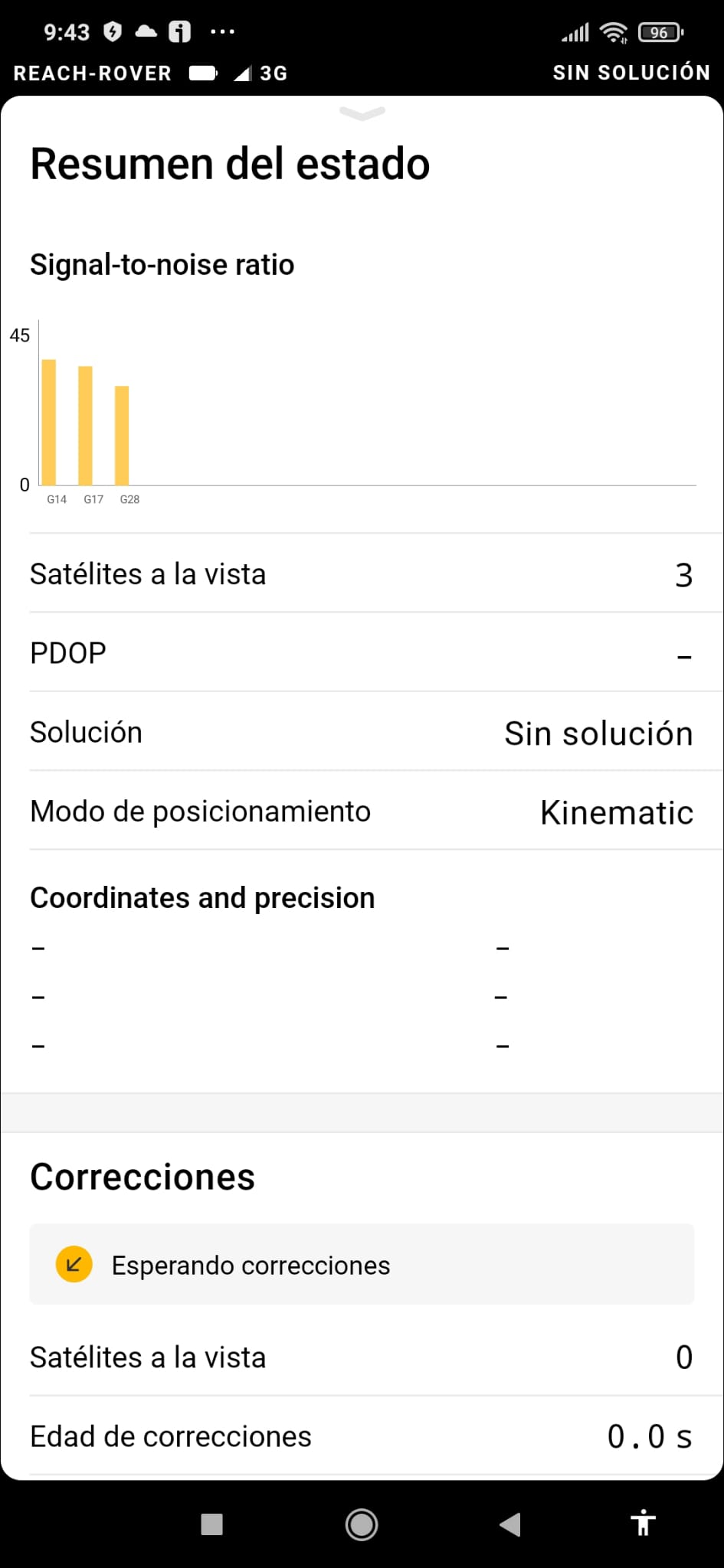
After that we move GPR+Rover into a narrow street and receive the message in my GPR software (HDOP low number of satelittes + RTK Fix)…so it is fine…but sometimes the RTK solution changes into a FLOAT and I can see how the position of stating to be not good in my profile…
The question is:
I connect BASE-ROVER+GPR system properly.
I get a FIX state in BASE.
Although I miss coberture of satellites in ROVE+GPR…I have RTK FIx solution (good precision)…but
Why the configuration fails changing into a FLOAT…while I hold the line-of-sight between BASE & ROVER???
Keep waiting your support and comments. Thank in advance.
Sounds like the Sky-view is blocked in the narrow street. Does the system work in a more open area? You could have a look at the RINEX with Emlid Studio to confirm and see how many satellites were available and what the quality of the signals was.
Yes, in open area works fine and also when I move to narrow street (few meters) still works fine…but 10-15 meters (hoildin the line of sight direcly between BASE and ROVER) could miss the FIX status the ROVER and changes to FLOAT, loosing some accuracy in the position.
Ah sorry…I didn’t understand.
I put NTRIP corrections at the BASE and sending by OUTPUT correction via LoRa to ROVER.
NTRIP correction comes from IGN server is the national server positioning data in Spain.
At the same time, I put in Input correction at Rover and the transmition data via RS232 (NMEA 9600 baud rate)
If you are not talking about this…please be more detailed…I am not an expert as you can see. Thank you for your interest!
In fact, my question is…whay the ROVER changes to FLOAT from FIX is the corrections are sending by LoRa from BASE that it is always in FIX mode and static. I should put BASE into “STATIC” or it is doesn’t matter.
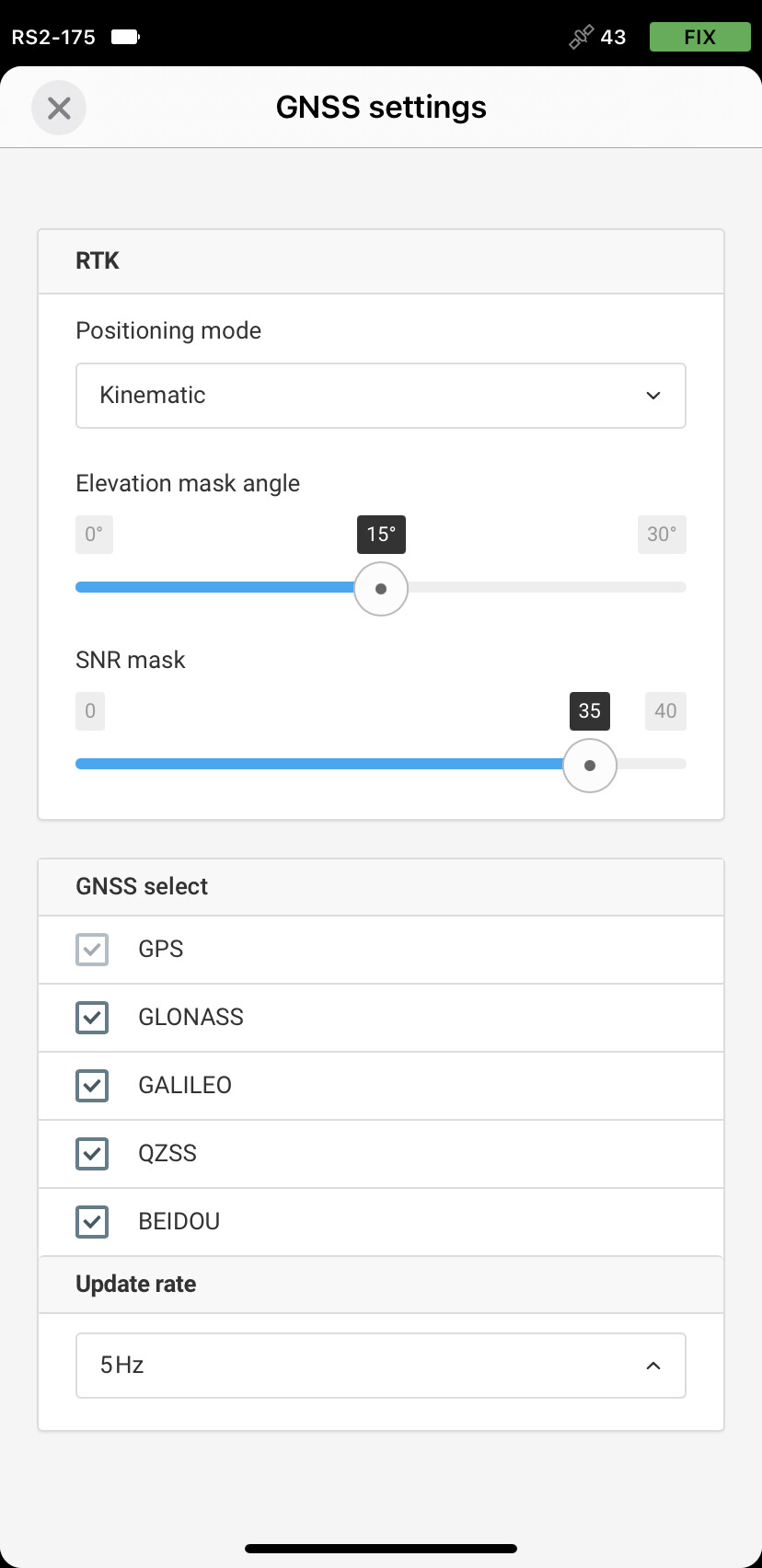
When the rover changes solution status to Float, that means it receives corrections from the base, but it cannot resolve all ambiguities. So, LoRa works fine in that situation. However, it looks like the street is too narrow, and the sky view is significantly blocked. I assume the rover sees only 20-30 degrees of the sky, which may be the root of the issue.
I agree with @PotatoFarmer that you need to check you use all constellations in GNSS settings. And regarding your question about Static and Kinematic in positioning mode. It’s better to choose Kinematic for the rover and Static for the base.
Thank you for @PotatoFarmer and @anna.moloko.
I have told with the provider. If the Rover has not see enough sattelites its status will change to FLOAT (as you said @anna.moloko ) The only way is to set the BASE in the top a building in the around…but my new question is: if there is not direct view between BASE and ROVER…the ROVER will receive LoRa correction properly?
I’m curious, why not just set up your Rover to accept NTRIP corrections directly?
Is the baseline to the GNSS NTRIP Correction Service exceeded?
At least their Base would be in clear sky view. Though I still see problems with getting clear sky in your environment for your Rover as mentioned by others. See how the buildings/trees are casting shadows on your GNSS receivers, which I would think means they have to be pretty close to those objects. So they would be interfering with the Rover from seeing all of the GNSS satellites available.
@PotatoFarmer is right. LoRa connection depends on local conditions. However, you also can use Emlid Caster to transmit corrections. For this, you need to provide both receivers with the Internet.