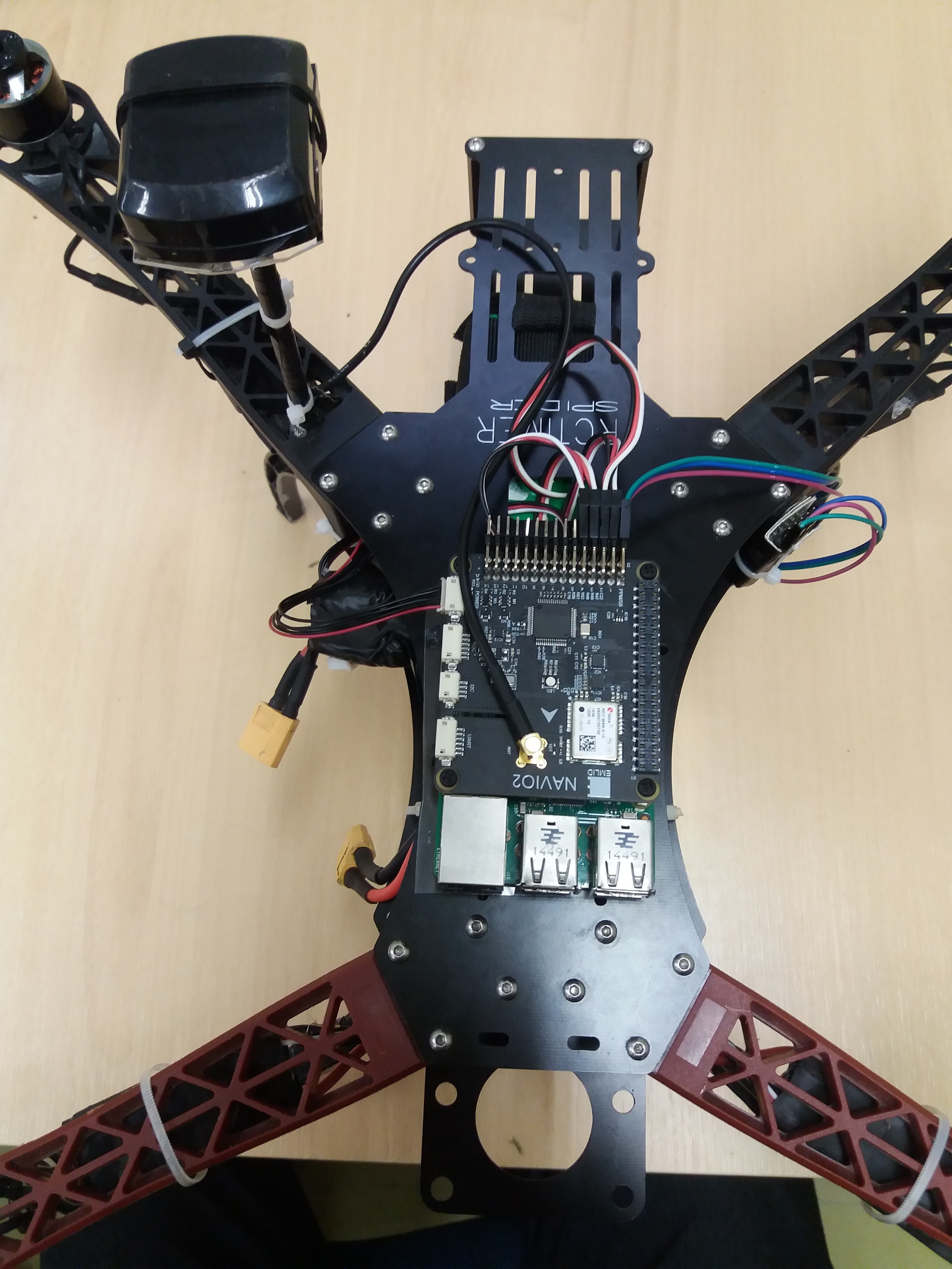
I built a quadcopter using navio2 as the controller, but i am having some problems to make it work correctly.
The drone isn’t taking off correctly, and always ends up pending to one side and crashing immediately.
I am using the Raspian Stretch image, with Ardupilot 3.5, provided at Emlid Docs. The calibration routines of the accelerometer, compass, and radio were made using MissionPlanner, and the quad frame is of type X. The ESCs were also calibrated using the All-at-one method.
The ESCs and motors seem to be working correctly, because I made some tests using APM2.6 controller, and the flight went well.
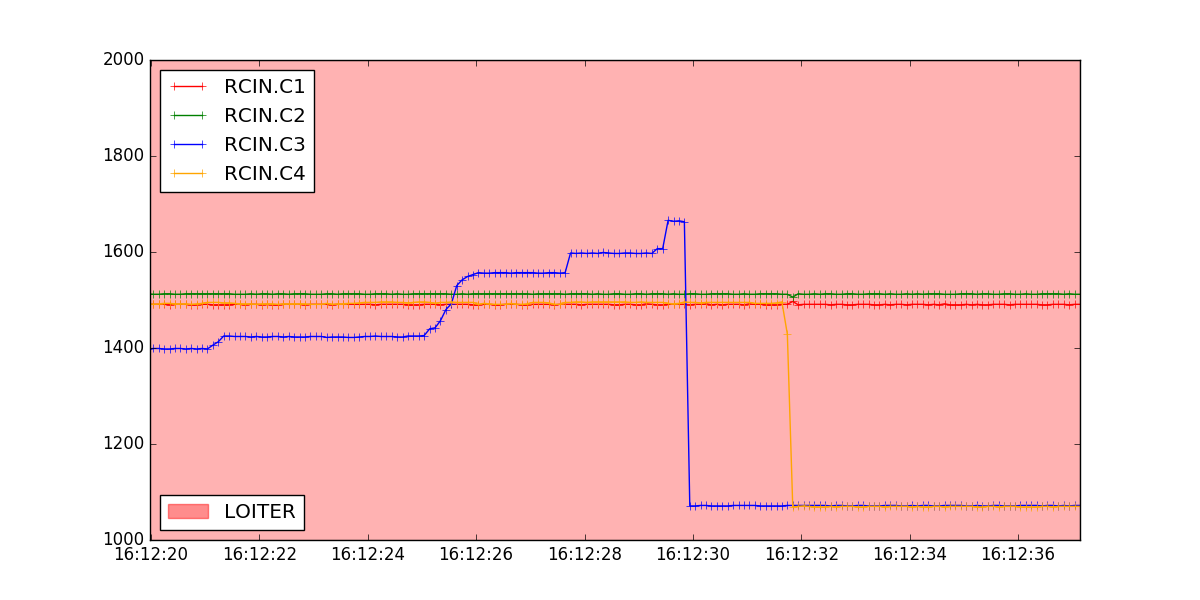
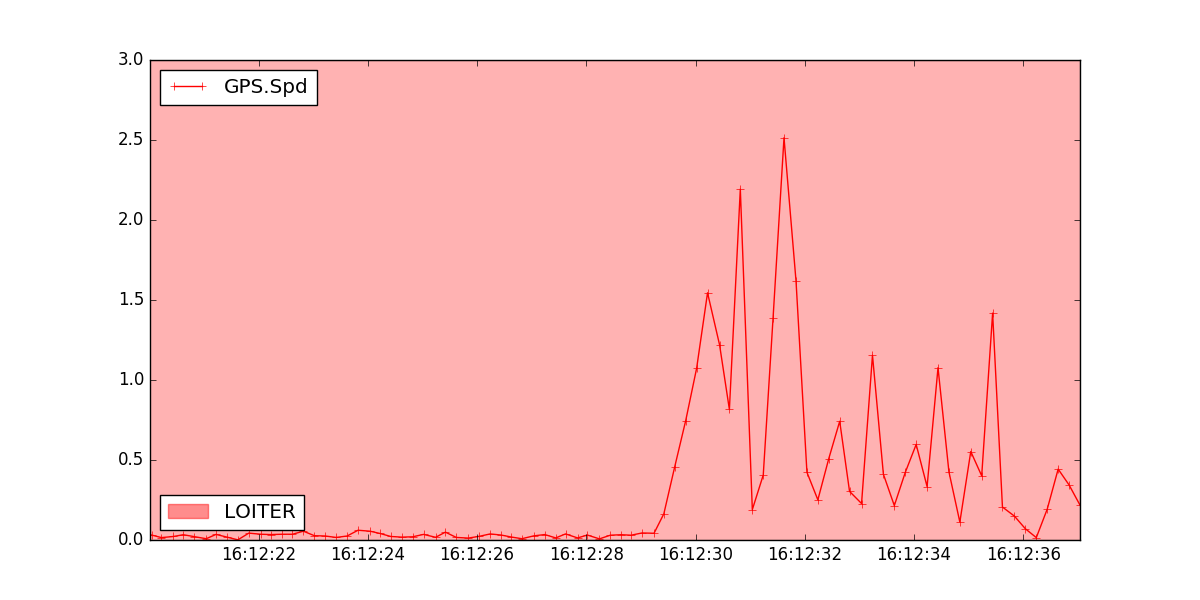
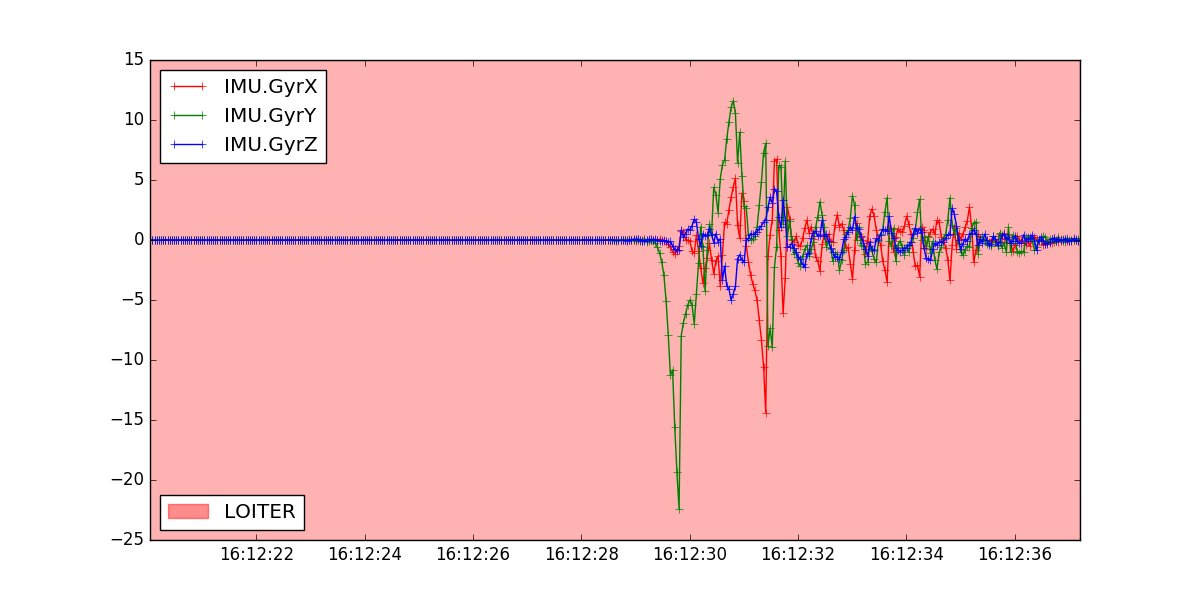
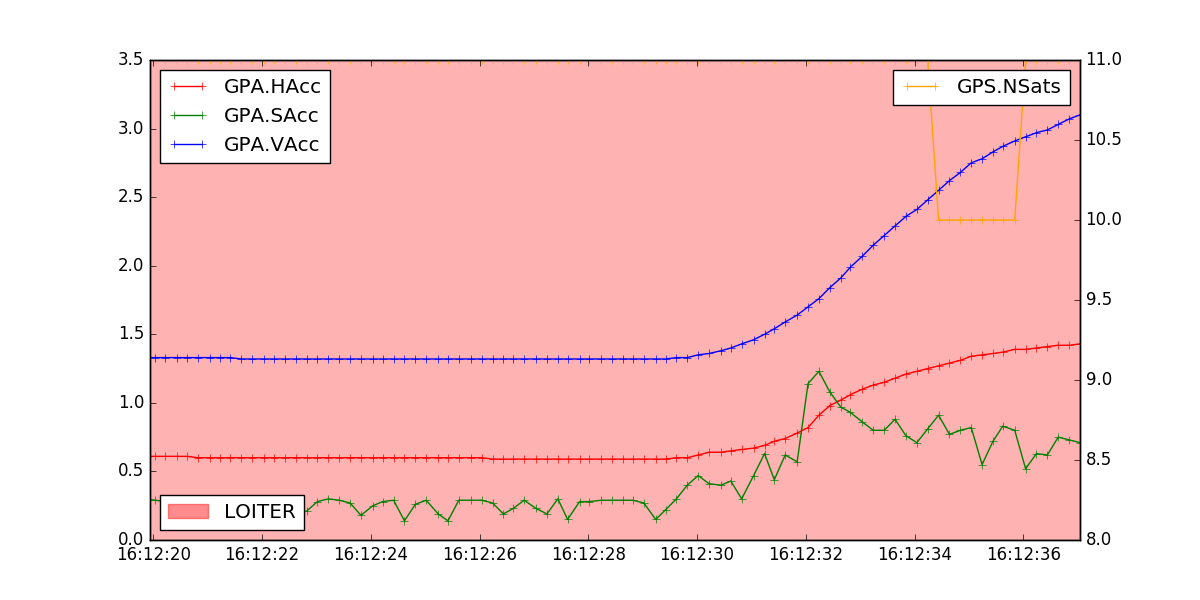
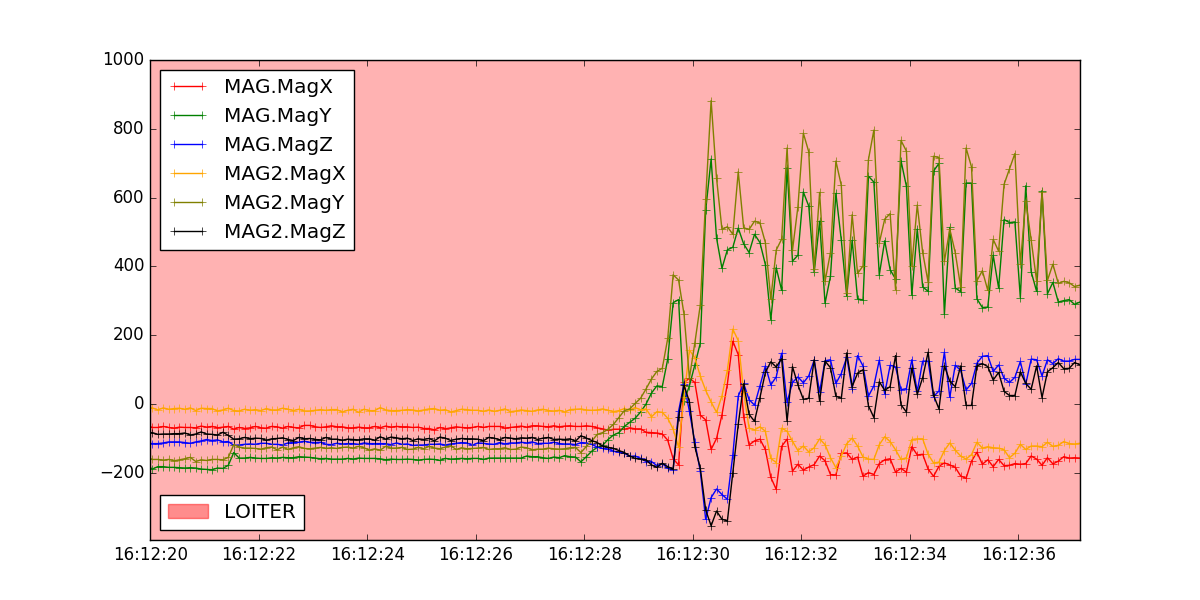
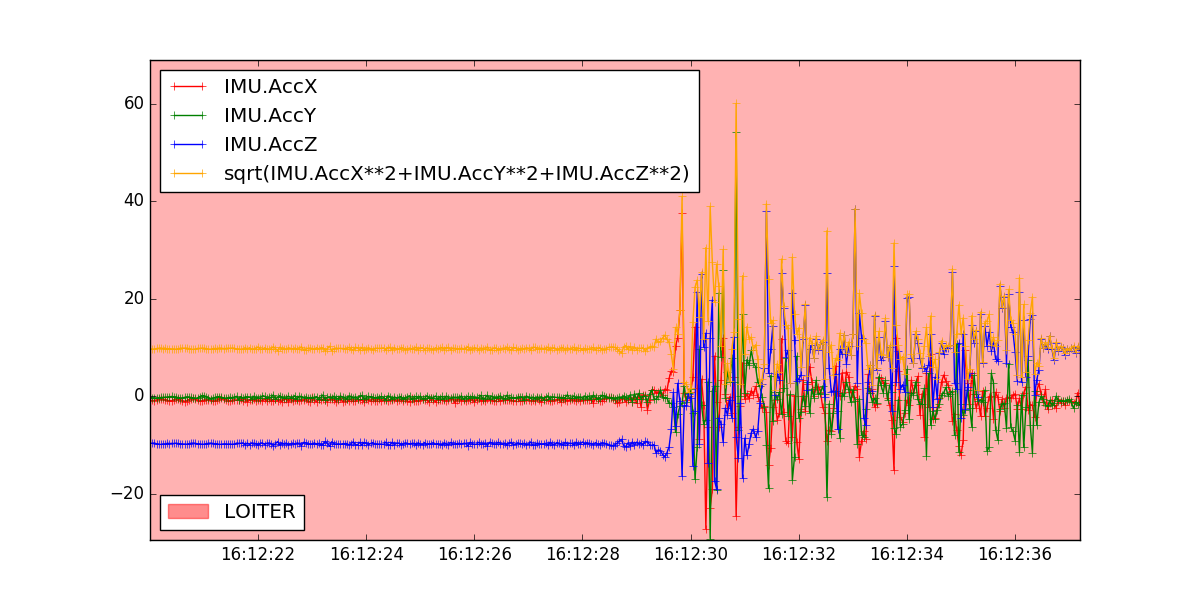
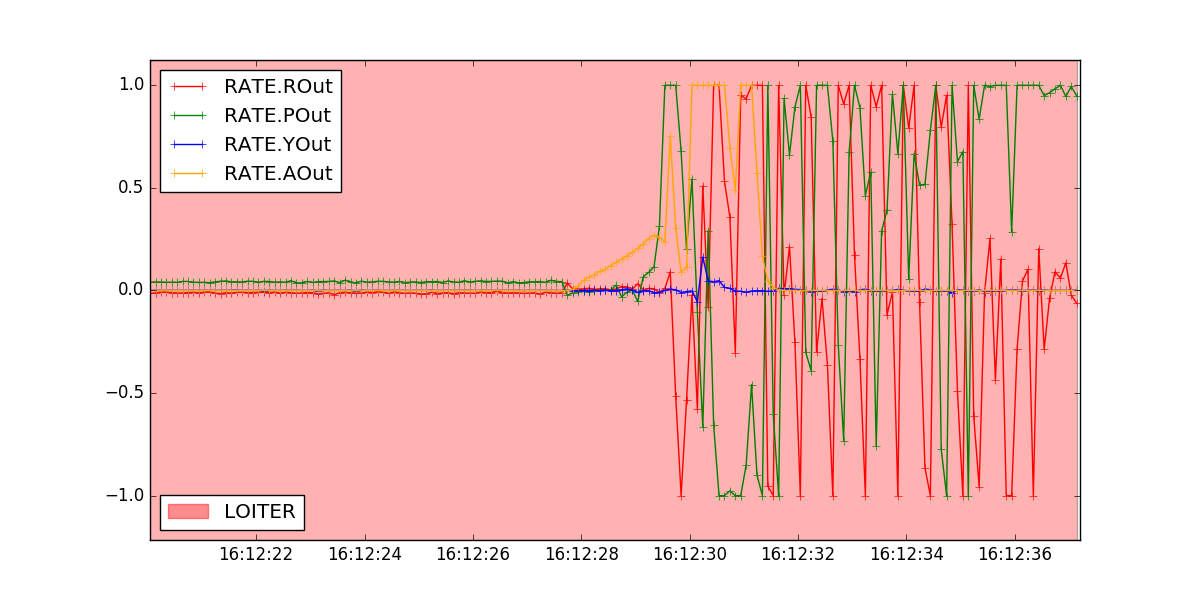
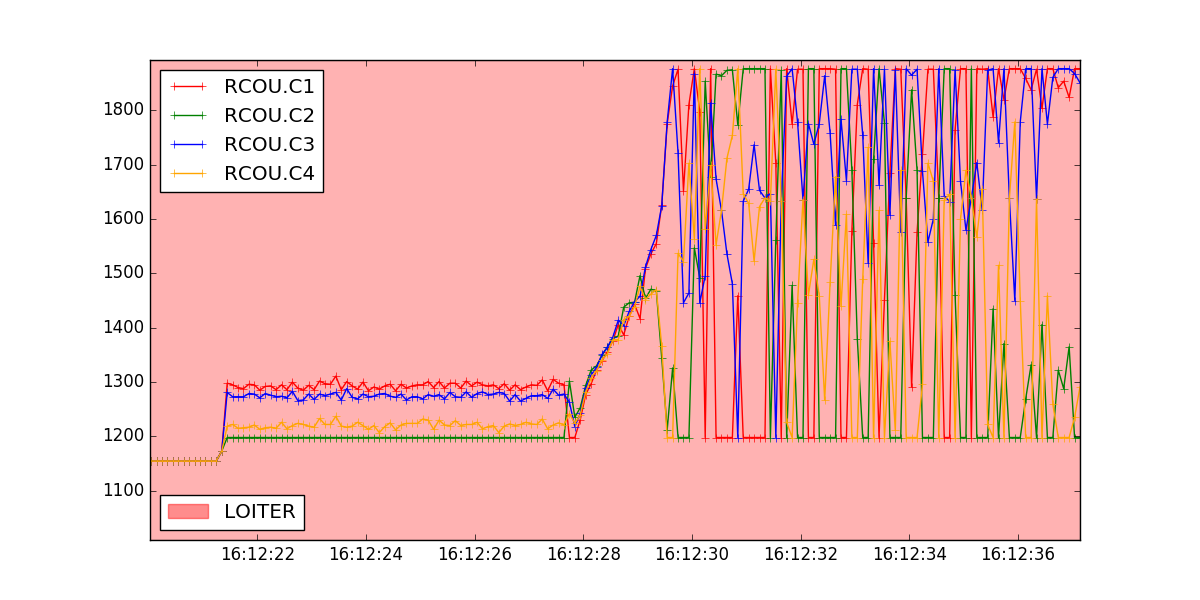
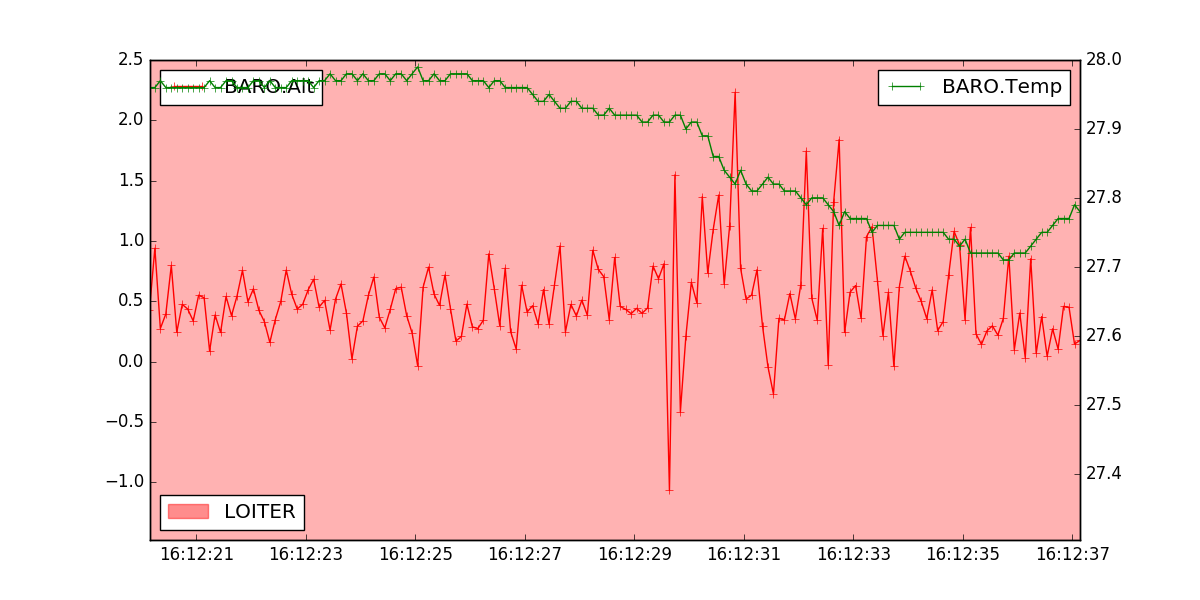
This error happened multiple times, and checking the logs there seems to be an unexpected behavior of the PWM output provided to the motors. This happened in both stabilize and loiter modes.
The following logs are from the most recent crash.