Antena é a Tallysman, altura é de 23cm para corrigir a altura da antena no sensor da câmera. O erro do braço de alavanca não é contabilizado e deve ser corrigido com o controle de solo.
Obrigado.
Antena é a Tallysman, altura é de 23cm para corrigir a altura da antena no sensor da câmera. O erro do braço de alavanca não é contabilizado e deve ser corrigido com o controle de solo.
Obrigado.
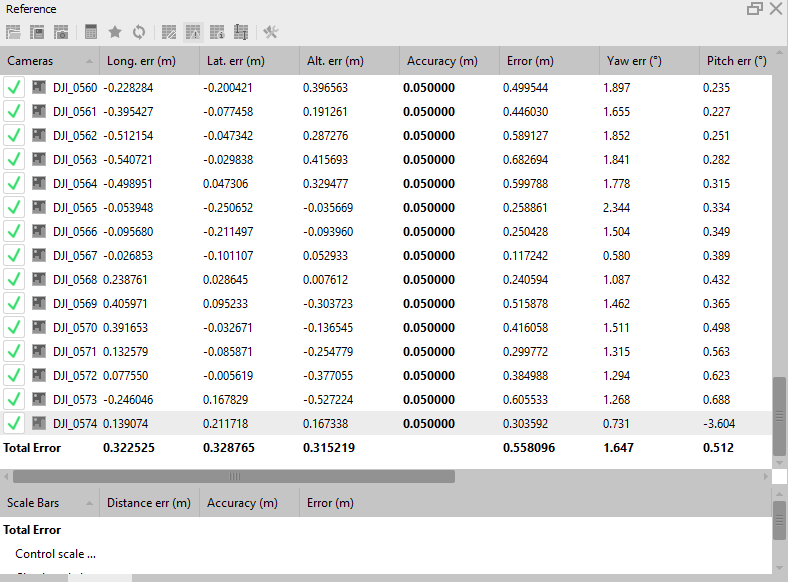
Você tem que mudar a acuracia das imagens pra uns 0.05m … e mesmo com correção que o João falou, dificilmente você chegará a 2cm de precisão… só o GPS em modo cinemático já erra em torno desse valor… cuidado com esse tipo de propaganda rs
Bom dia,
pensava que a acurácia era corrigida automaticamente pelo software de processamento. Veja como ficou, ja melhorou bastante. pra chegar na precisão desejada eu uso GCPs.
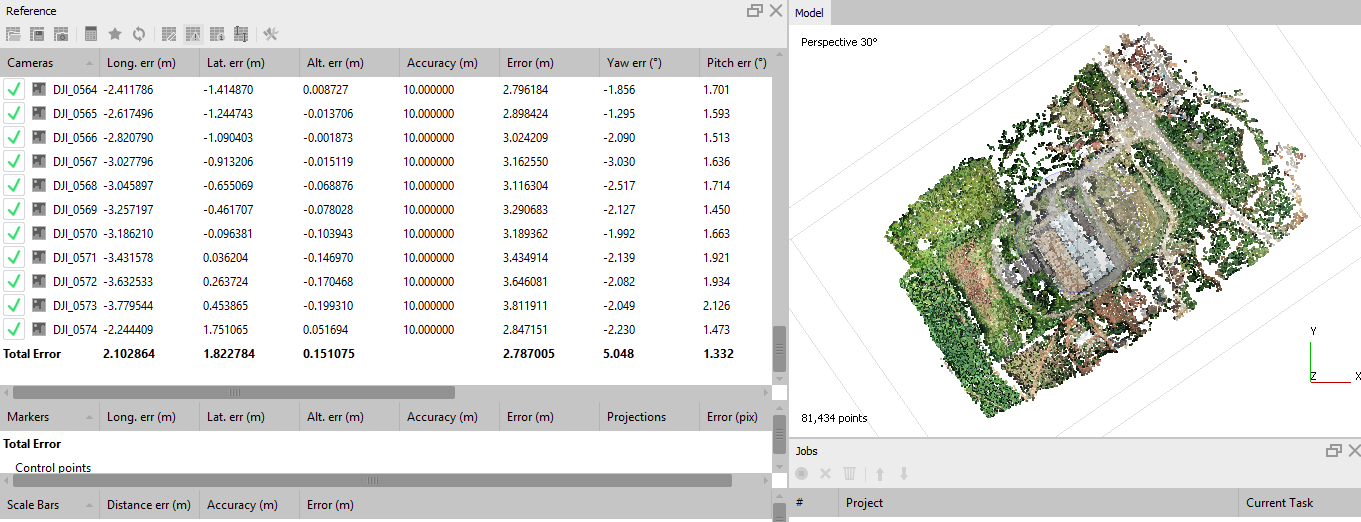
@tiedtke mas se eu alterar a acurácia nas imagens do drone sem o PPK também melhora. é certo fazer isso ?
Pode até melhorar, mas será um resultado falso… um gps de drone sem ppk erra facilmente 5~ 10m … se você falar pro programa que as coordenadas são precisas, ele vai gerar um resultado equivocado e se você acreditar, você vai estar gerando produtos cartográficos com erros graves
ou seja, nunca deixe de usar GCPs. só assim para ter certeza do resultado.
O RTKlib /rtkpost só faz o processamento da trajetória
Corrigir as rotações e compensar sincronismo e offset e outras correcies de sensor ele não faz, e no caso do Phantom, isso é crucial pra ser usar PPK de alta precisão, que pode eliminar totalmente o uso de pontos de apoio.
O software oferecidos pela Guandalini e pela T2R (minha empresa) realiza essas correções de forma rigorosa
Pra ter certeza, deve usar pontos de check
vou entrar em contato
This topic was automatically closed after 100 days. New replies are no longer allowed.