



Estou com um problema sério de perda do ciclo em um reach m+, estou usando um plano de aterramento de Pcb de 90mm alimentado por um bec castle compartilhado com um rádio rfd900 e marcador de tempo na câmera, o modulo reach m + montado abaixo do plano de aterramento, agora eu toquei o aterramento por uma placa de alumínio de 10cm e 3mm e também coloquei o módulo fora da fuselagem, amanhã realizarei os testes. mais alguma sujestao?? Eu nunca fui capaz de usar o sistema pelo fato desse problema
pós-processamento feito no rtklib 2.4.3 b28 por emlid
esc castle 50a 8s
motor tmotor 8s
batery 8s





Ja resolvi o problema no fórum Internacional , mas obrigado Cycle slip when reach M + in UAV - #12 by michaelL
2 Likes
Olá Bruno, tenho um BATMAP (rvjet ) embarcado um M+ com o mesmo problema de perca de ciclos, poderia descrever o que você fez para resolver este problema ?
Desde já agradeço.
Jefferson, qual é a mascara de elevação que está usando? E também, qual SNR? Poderia postar mais informações aqui?
Sugiro alterar a máscara para ~15° e fazer um novo teste.
O SNR para 35 ou 40
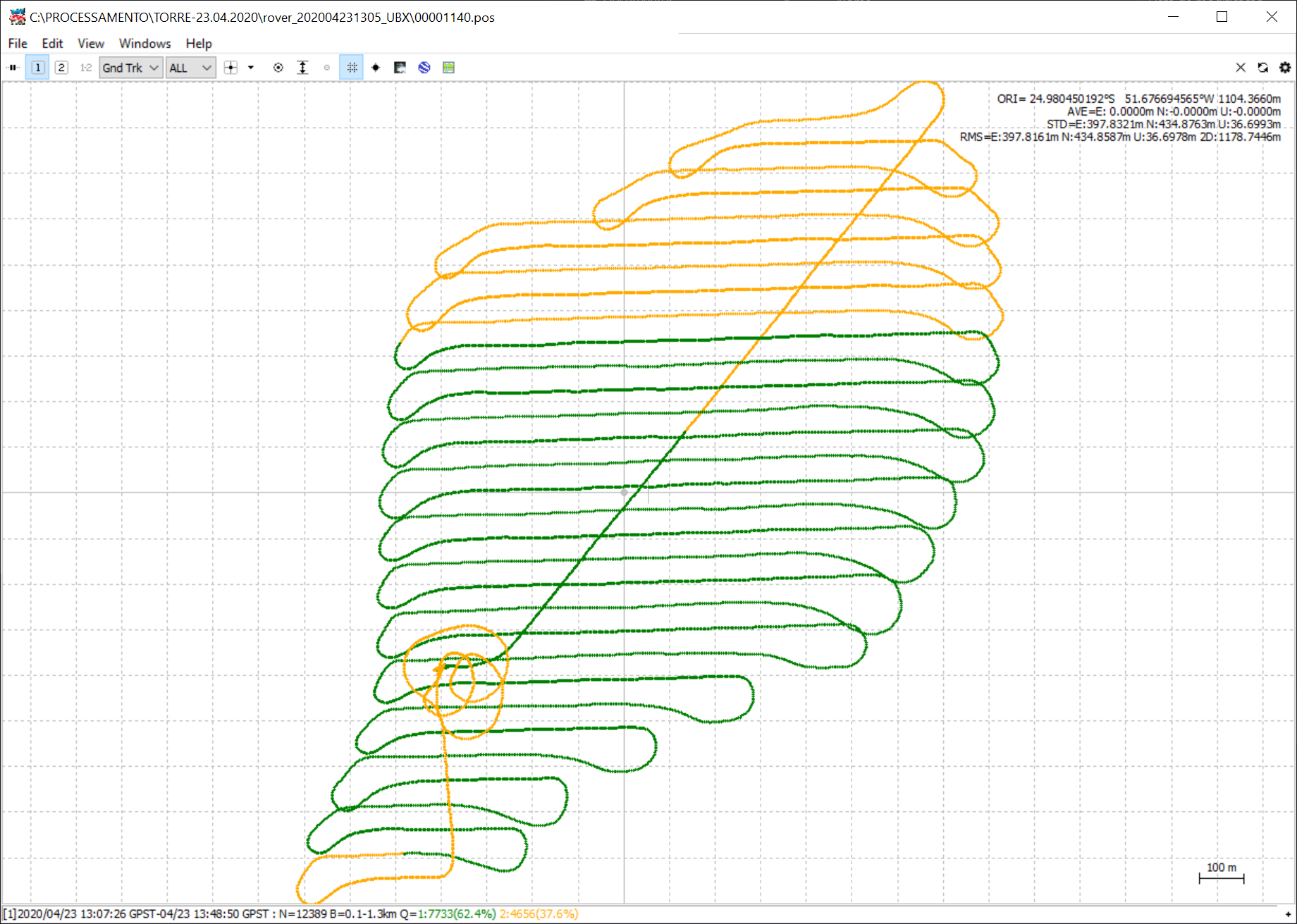
O problema na real não era perda de ciclos e sim um sinal baixo dos satélites, alterei a mascara pra 20 graus e o snr para 30 e consegui fixar a solução, se tiver interesse esta bem explicado em outro post, postei o link ali em cima, mas me sugeriram colocar filtros de ferrite nas alimentações dos módulos, parra melhorar esse sinal. e também estava com uma placa de aterramento de pcb de 9cm alterei para uma de alumínio de 10cm, vou fazer o teste para ver se melhora a recepção do sinal.
qual acurácia vocês tem conseguido em z com o ppk sem os pontos de controle?
Isto depende muito da câmera utilizada.
O erro em X, Y fica excelente (GSD) porém o erro em Z precisa de um único ponto para ser corrigido quando utiliza-se um Phantom por exemplo. Mesmo que faça a calibração, com o tempo, irá degradando
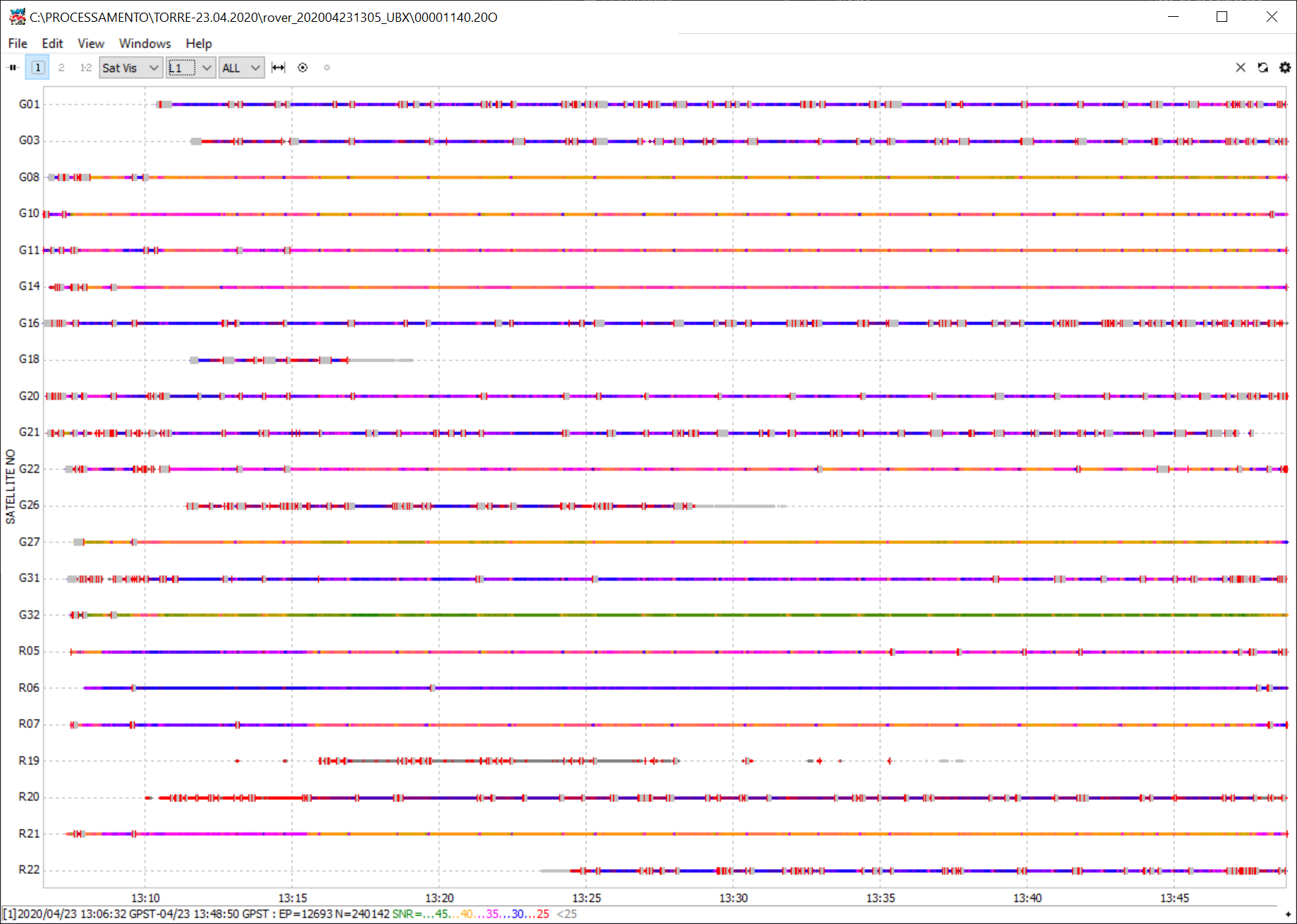
Olá João segue o SNR e o arquivo .conf do rtkpost.
Sempre utilizo a máscara em 15º.
então o seu problema era no processamento. quando vi o tópico “perda de ciclos” achei que tivesse o mesmo problema que eu estou tendo.
Como não tenho acesso ao receptor m+ fica difícil instalar os anéis de ferrite para diminuir o ruído, porem mesmo com ruído tenho obtido solução fix em meus levantamentos.
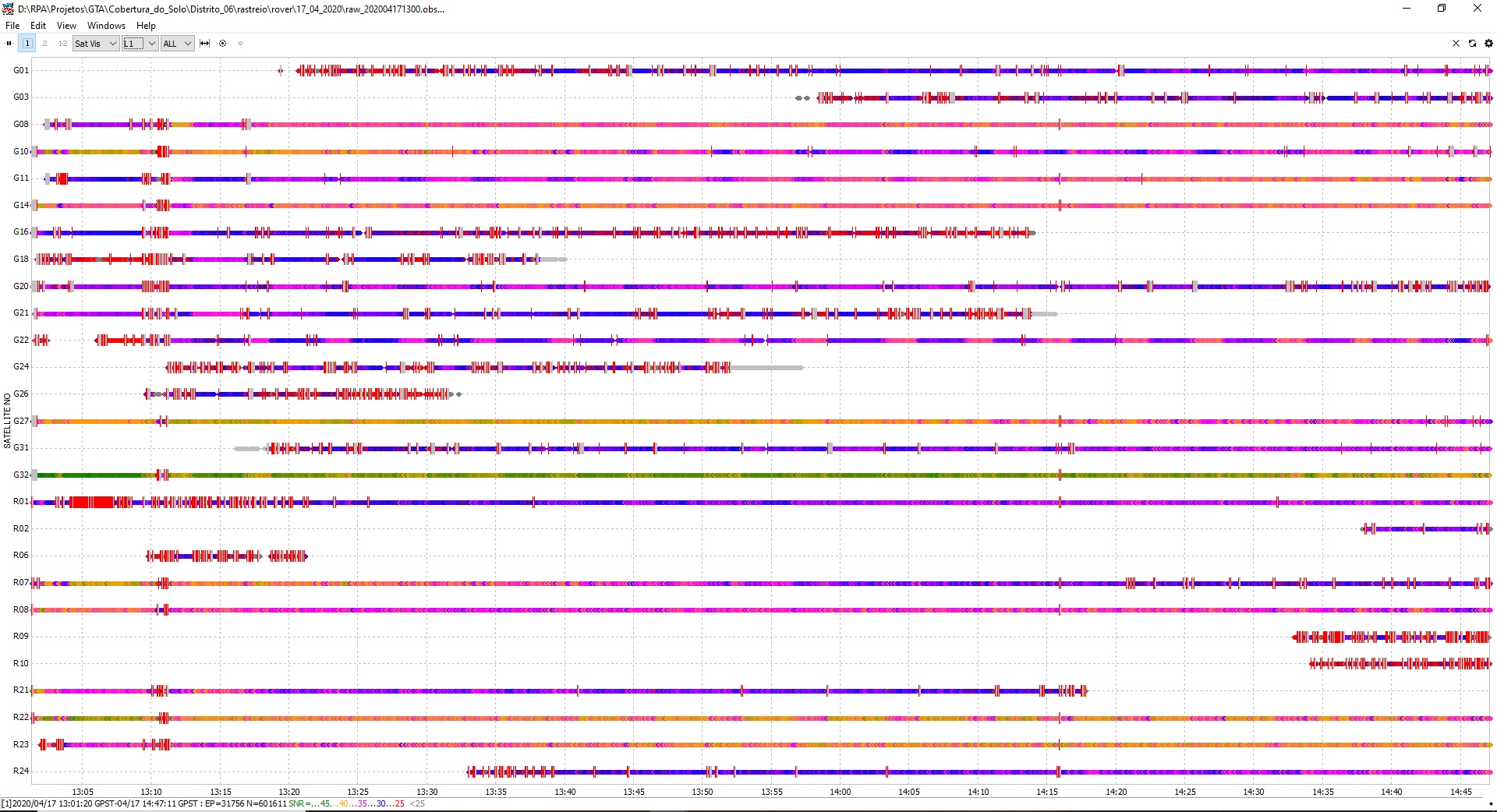
Agora estou tendo um problema que ao lançar o VANT o M+ desliga. Realizei um mapeamento em 17_04_2020 onde o primeiro waypoint foi um loiter (voar em círculos) por 5 minutos a 50m de altura e a praticamente 10 m da base. Antes de lança-lo verifique que o M+ estava gravando e que após o lançamento o mesmo perdeu o sinal do wi-fi e após o pouso vi que o log havia encerrado após a decolagem.
O que me intriga é que alguns acham que isso é devido a alimentação, mas toda a eletrônica é ligada em uma única bateria. Caso tivesse um um desligamento, mesmo que repentino o VANT iria parar de voar ou mesmo de transmitir dos dados de voo, coisa que não aconteceu.
Realizei uma att de firmware, da versão v2.16.2 para a atual v2.22.4, amanha irei a campo pra ver se mudou alguma coisa.
Pode mandar fotos da sua montagem?
como disse acima, não tenho acesso ao receptor.
Oq o pessoal da nuvem USB fala sobre o assunto ?
Veja, antes precisaria confirmar se o problema não pode estar na parte Reach M+ e o restante, ou seja a integração.
Pois a configuração está toda correta.
O ‘setup’ ou seja, a montagem, é importante para esta confirmação
This topic was automatically closed after 100 days. New replies are no longer allowed.