Hello
We have been tired to set an external compass for Navio2, but we could not.
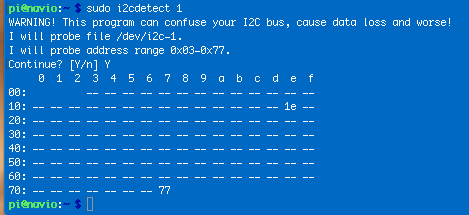
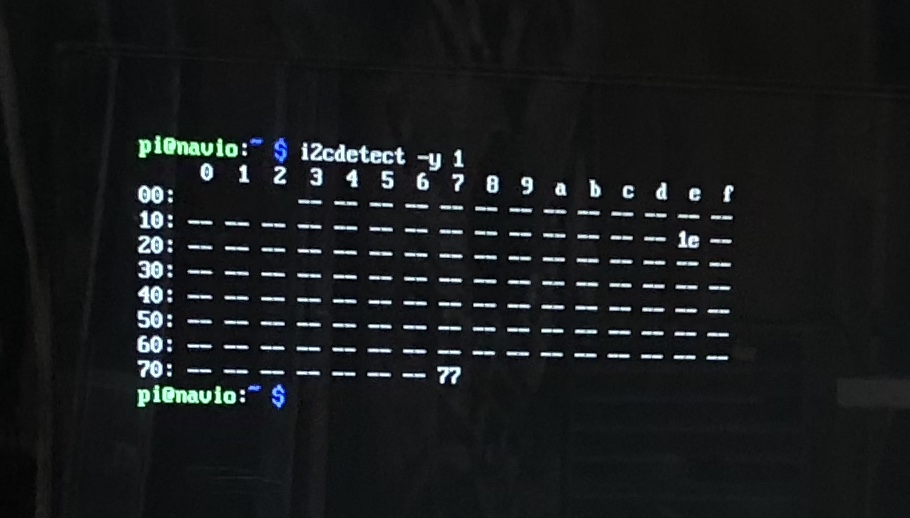
We have a GPS+Compass, where the compass is connected to i2c port and GPS is connected to UART.
We have configured -B option for the external GPS and external GPS works fine.
However, the external compass is not detected.
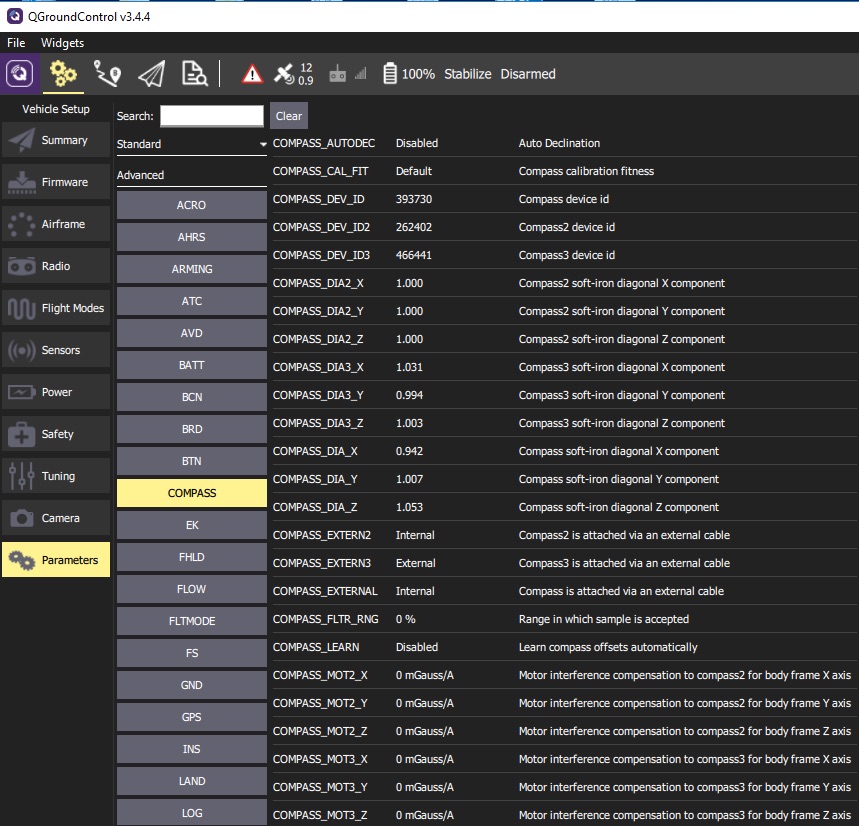
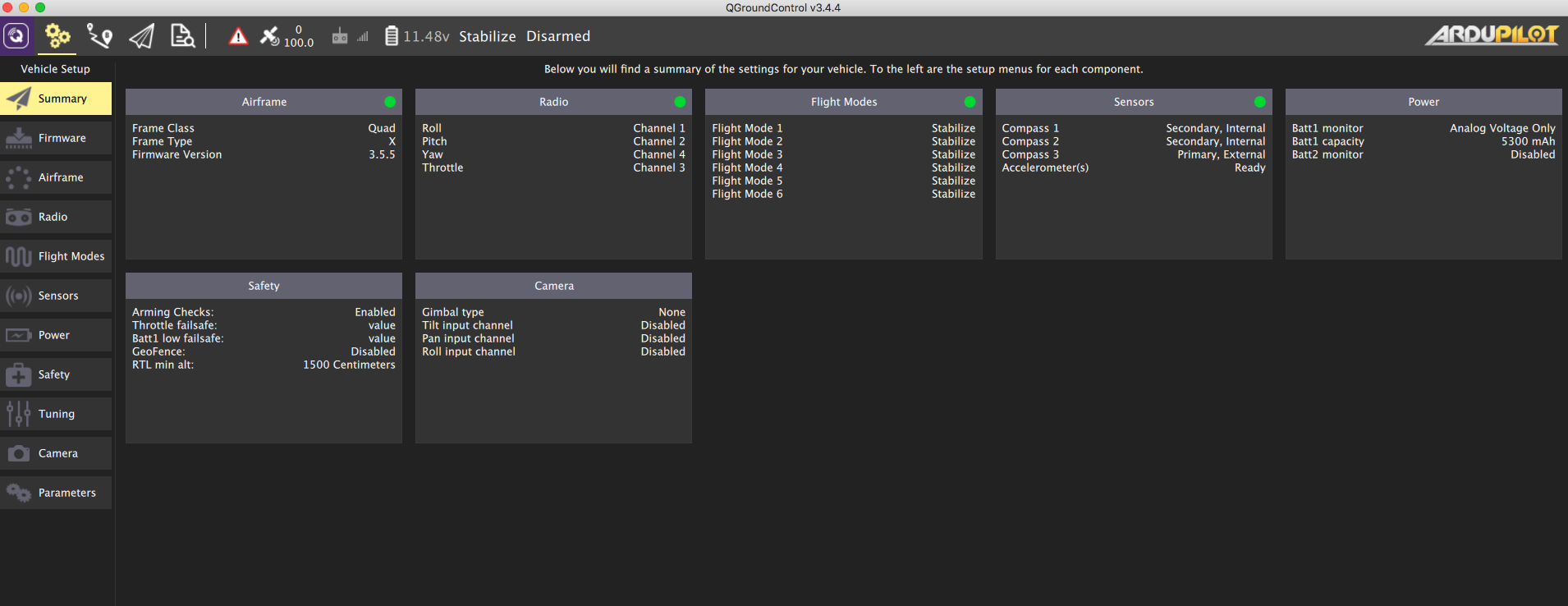
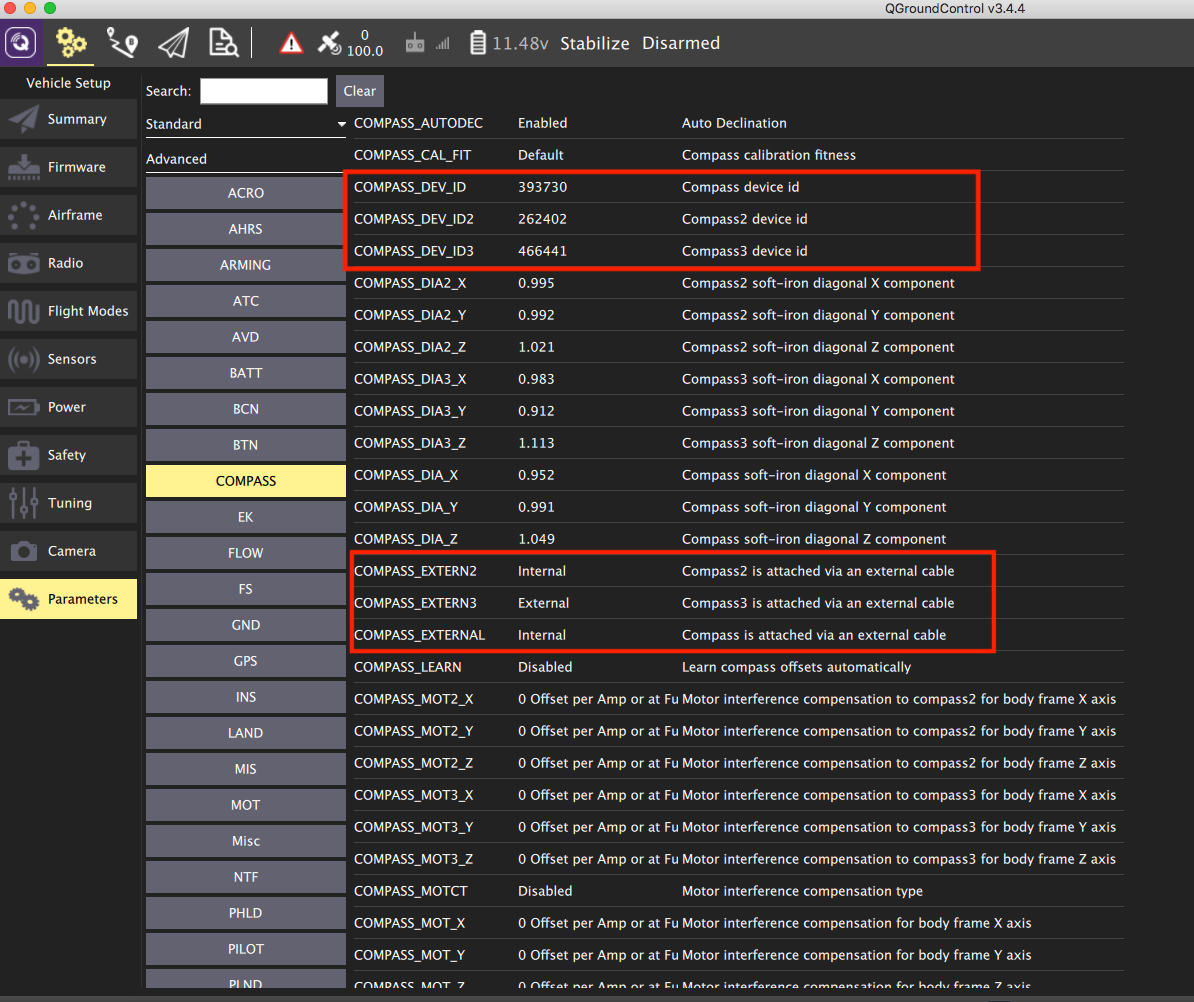
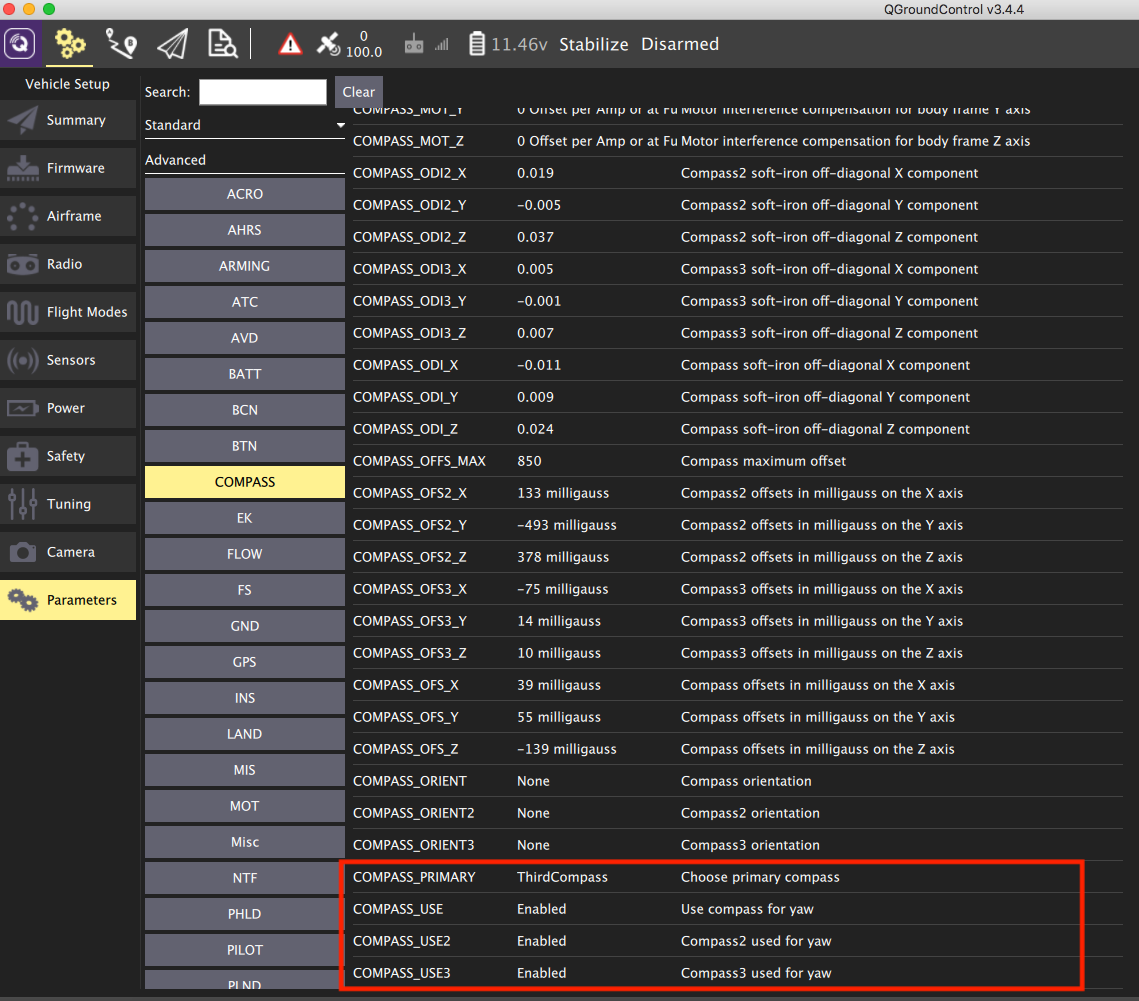
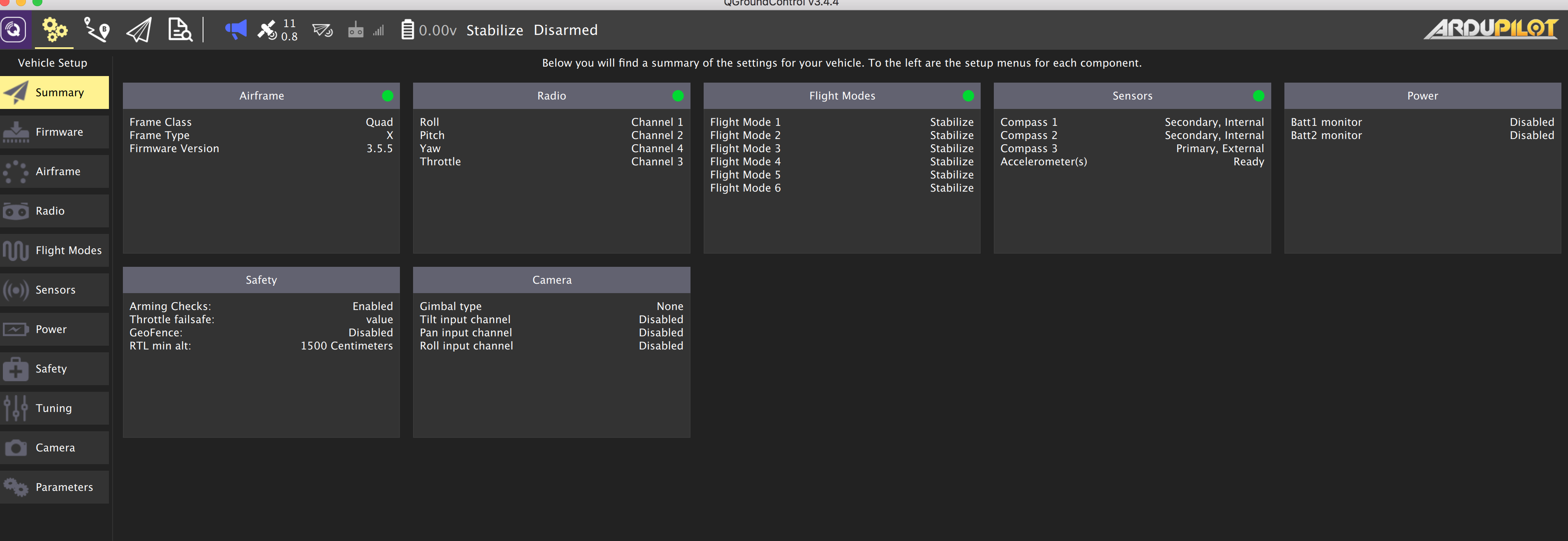
Even through we configured to use Compass 3, which is external to be the Primary compass, this is not considered (please see attached image).
When I move the compass manually, there no change in orientation of the drone, but if I move the whole drone, the orientation changes. This means it is using internal compass instead.
Can you please tell how to configure Navio2 to use the external compass.
We use different GPS+Compass modules and different Navio boards and it is always the same thing.
Please help on this, we are stuck for several days.
Thanks
Anis