



Hey, I have a problem here with The IMU when I run AccelGyroMag.cpp i get zeros even when I tilt the Navio . Plz Any idea @igor.vereninov
Please make sure that your Navio is fixed with screws to Raspberry Pi.
Yeah i did, The Barometer example works preety fine but the IMU doesn’t
@B.rayane do you have Navio+ or Navio2?
I have Navio+
Could you please post output of emlidtool?
Here it is the output, I have no connection problem. have you any idea how to solve it. Thank you
emlidtool version: 0.8.8
Vendor: Emlid Limited
Product: Navio+
Issue: Emlid 2017-03-23 5e28de2c424cadfb61a62b88e9c0af98a6d25545
Kernel: 4.4.36-a7765e7-emlid-v7+
Trying to run tests
Testing all sensors
2017-06-09 10:41:35 navio root[887] ERROR mpu9250: Failed
– Reason: No connection!
2017-06-09 10:41:35 navio root[887] INFO ms5611: Passed
emlidtool -h to get more help
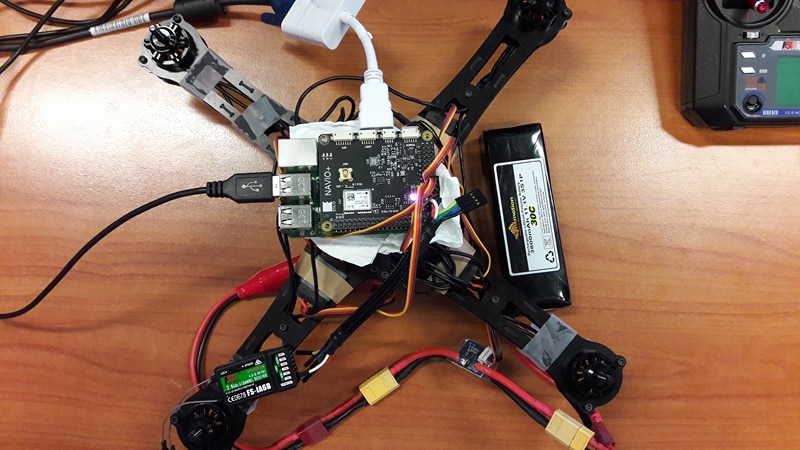
A picture of the setup will certainly help!
Looks like you didn’t screwed down the board!
I did from the diagonal, it is not loose, I ll screw it all over and try again
i screwed the Navio and tried again here what I had when I run emlidtool
pi@navio:~ $ emlidtool
emlidtool version: 0.8.8
Traceback (most recent call last):
File "/usr/local/lib/python3.4/dist-packages/emlid/deviceinfo.py", line 12, in __init__
with open("/proc/device-tree/hat/vendor", 'r') as f:
FileNotFoundError: [Errno 2] No such file or directory: '/proc/device-tree/hat/vendor'
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/local/bin/emlidtool", line 9, in <module>
load_entry_point('emlidtool==0.8.8', 'console_scripts', 'emlidtool')()
File "/usr/local/lib/python3.4/dist-packages/emlid/emlidtool.py", line 81, in main
do_info()
File "/usr/local/lib/python3.4/dist-packages/emlid/emlidtool.py", line 33, in do_info
information = DeviceInformation()
File "/usr/local/lib/python3.4/dist-packages/emlid/deviceinfo.py", line 18, in __init__
raise NoHatException("Seems like you booted without Navio properly screwed!")
emlid.deviceinfo.NoHatException: Seems like you booted without Navio properly screwed!
and I still have the same problem, I have tilted it in all directions. here is the output:
pi@navio:~/Navio/C++/Examples/AccelGyroMag $ ./AccelGyroMag
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
Acc: +0.000 +0.000 +0.000 Gyr: +0.000 +0.000 +0.000 Mag: +0.000 +0.000 +0.000
here is the set:

could it be the power !!! please help
Seems like something is wrong with the IMU chip. Please check your PM.
Did you solve the problem? I have a Navio2 and I am getting the same emlidtool ERROR mpu9250: Failed --Reason: No connection
I got the same error but after screw it down, this error has gone and I got a different one, try to do the same. Well in my case there is something wrong with the IMU chip.
I have tested the PPM Example and also I tried to echo all the topic listed when running rostopic list and i wonder if it has something to do with the IMU
when i run the PPM Decoder Example, it seems like no PWM signal is generated and when i kill the process i get this:
2017-06-21 10:30:06 sigHandler: Unhandled signal 2, terminating
here it is the setup:

i have 4-8.4 Volt PPM, could it be the error!!
when echoing the topics (almost all of them), non of them was publishing except for /mavros/state and here it is the output:
header:
seq: 0
stamp:
secs: 1498038435
nsecs: 704922790
frame_id: ''"
connected: False
armed: False
guided: False
mode: ''
---
Any suggestion will be appreciated. Thanks