First, I would like to apologize for my poor English.
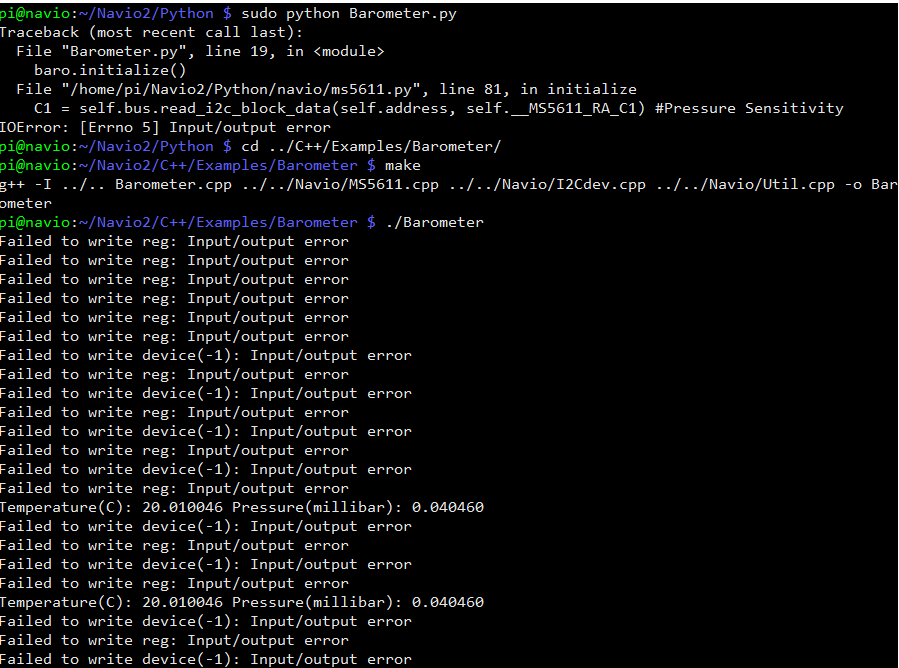
I am using Navio2 and RPi3 in order to build a quad-copter. The version of Arducopter is 3.4.6, and the RPi3 is working on the most recent version of the Raspian you provided. the network is working, the sensors MPU and LSM are working with the C++ an python examples (not in python for LSM). However, when I want to test the barometer, I am facing a few errors in C++ an Python.
We can see that in C++, the values of the sensors are constant and not significant.
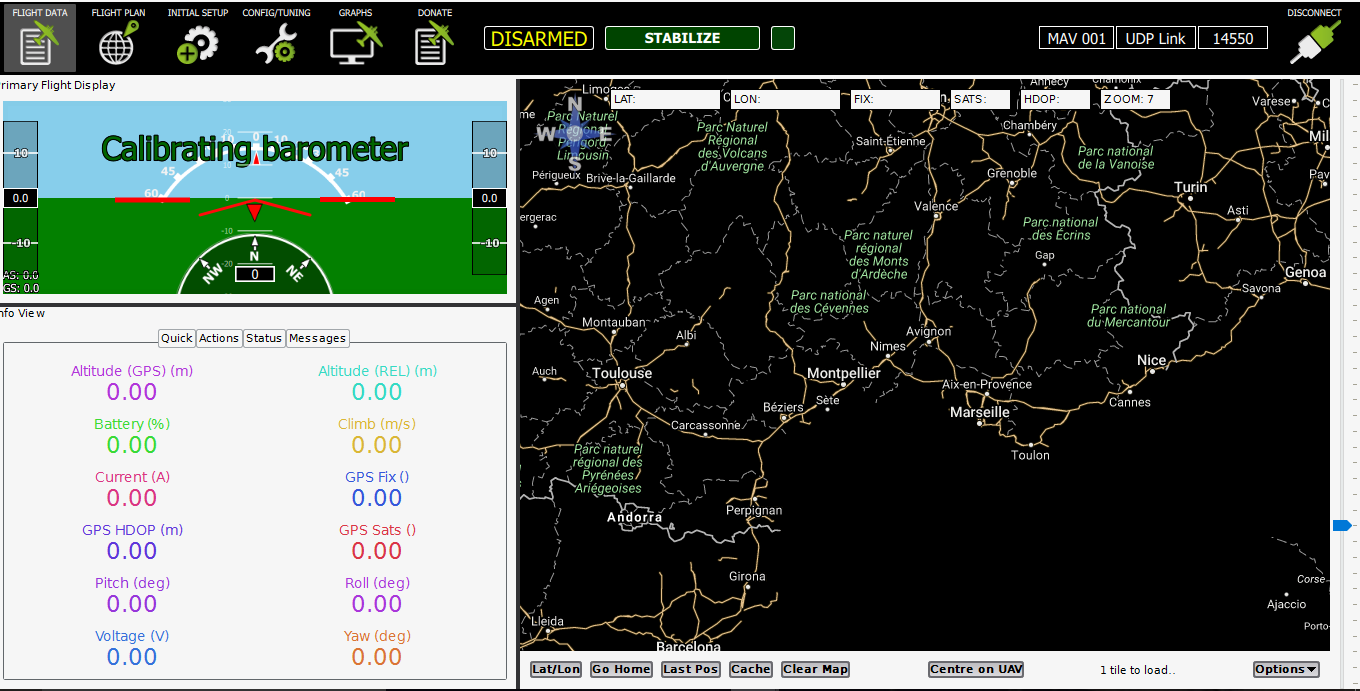
Moreover, when I try to connect to the GCS (APM planner2 or Mission planner), there is communication with the RPi3/Navio2, but the GCS is blocking on “Calibrating Barometer”
When I tried to comment the line i2c_bcm2708 in the file /etc/modprobe.d/raspi-blacklist.conf to have access to the peripherical connected to the i2c bus, I found nothing in this file as it didn’t exist.
I am very confused and have no solution.
I would be glad if you have any solutions.
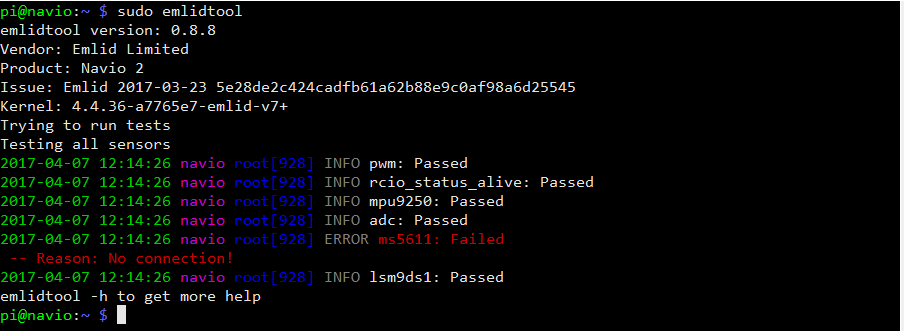
This is the result with the SSH connection, but with a simple connection (keyboard and screen), the pwm line returns "failed Reason : [Errno 13] permission denied : “/sys/class/pwm/pwmchip0/export”
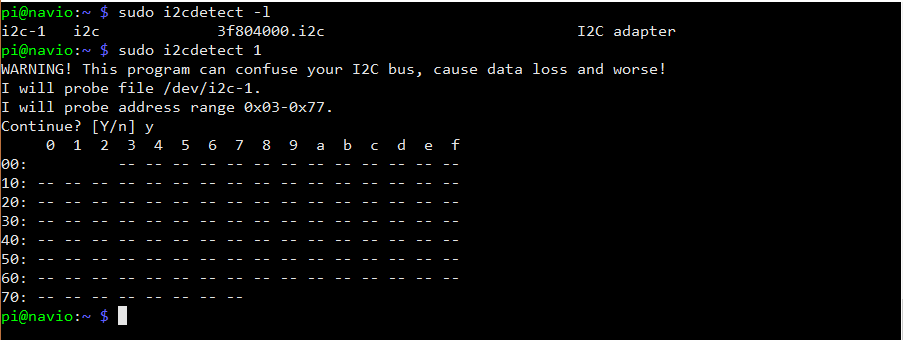
the return of the command is a bit long, but I suppose you are interested in this line (If not, tell me what you are looking for) :
Sorry, it’s taken me so long to reply.
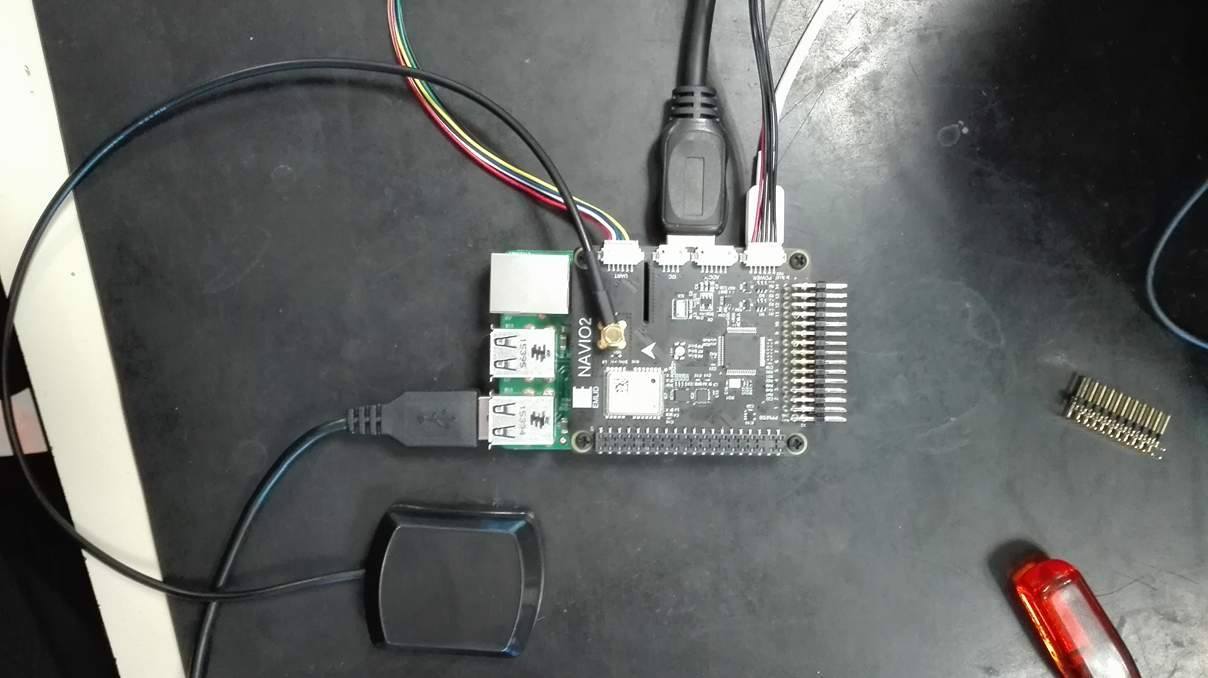
I’m more interested if there’s anything suspicious (any errors or warnings) issued after i2cdetect. If there’s none, try giving a little push to Raspberry Pi header and hold it as tight as possible to eliminate any connection issues and repeat. If nothing changes, we’ll arrange a replacement.