Hi,
I am new to PPK and eventually faced the problem.
I am using the Emlid studio app v1.3.
Yesterday with my Phantom 4 RTK I surveyed the area where a GSM connection wasn’t available. I turned off RTK mode for my drone and surveyed successfully.
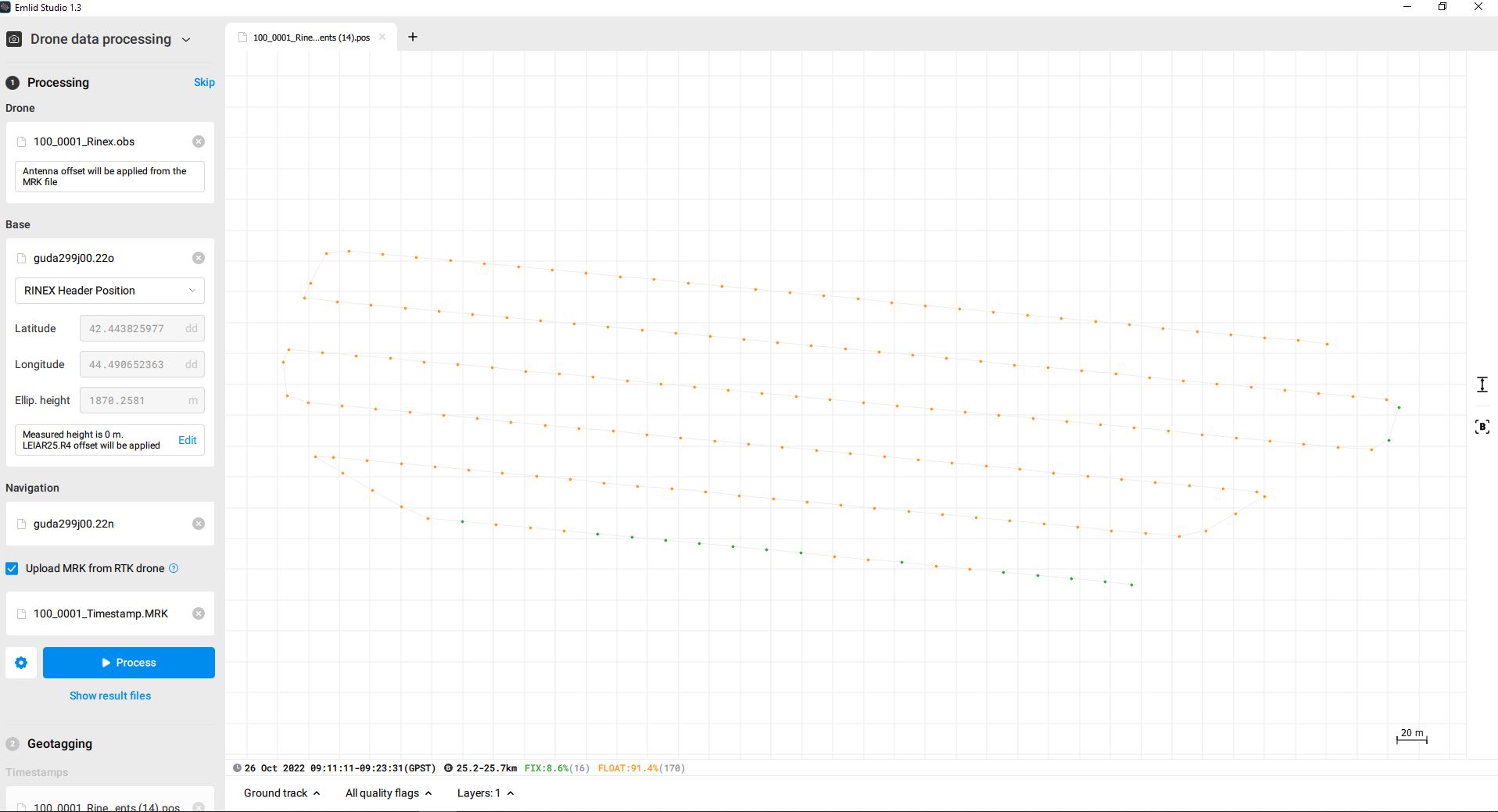
So, today I downloaded the nearest CORS base station raw data (starting and ending of the survey time are considered) and wanted to get RTK Fixed on my flight utilizing Emlid studio. But the results were not as successful as my surveying. Please, see attached screenshot of my results and inserted files.
After that, I tried different CORS base station data but the results were the same or worse.
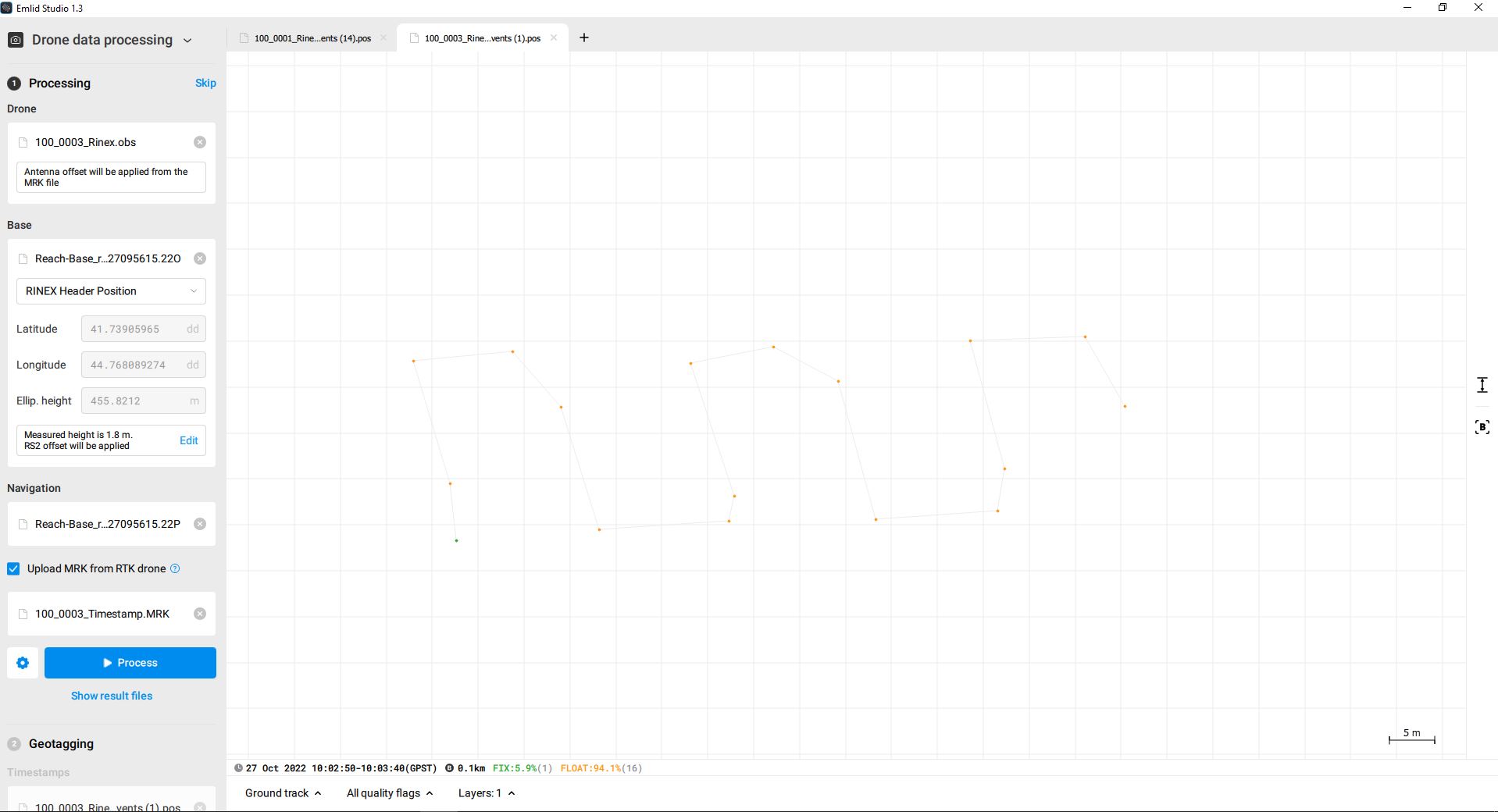
Then near the office, I tried a test flight with my Reach RS2 base station and recorded the Rinex raw data file and the results were not encouraging
Please, see the attached screenshot:
Finally, I am uploading all mentioned raw data files to have a look, and if it is possible let me know in which part I am making the mistake that is leading me to the Float solution.
Drone Survey raw data (2022.10.26) -
Drone_Raw_Data_2022_10_26.zip (4.5 MB)
CORS raw data (2022.10.26) -
guda299j00.rnx.zip (7.1 MB)
Drone Test survey (2022.10.27) -
Drone_Test_Survey_2022_10_27.zip (400.1 KB)
RS2 base raw data (2022.10.27) -
Reach-Base_raw_20221027095615_RINEX_3_00.zip (491.1 KB)
Hope we will find a solution.
Best,
Lado
1 Like
Hi Lado,
I’m sure we’ll figure it out! I’ll check the data you’ve shared and get back to you with my findings.
2 Likes
Lado,
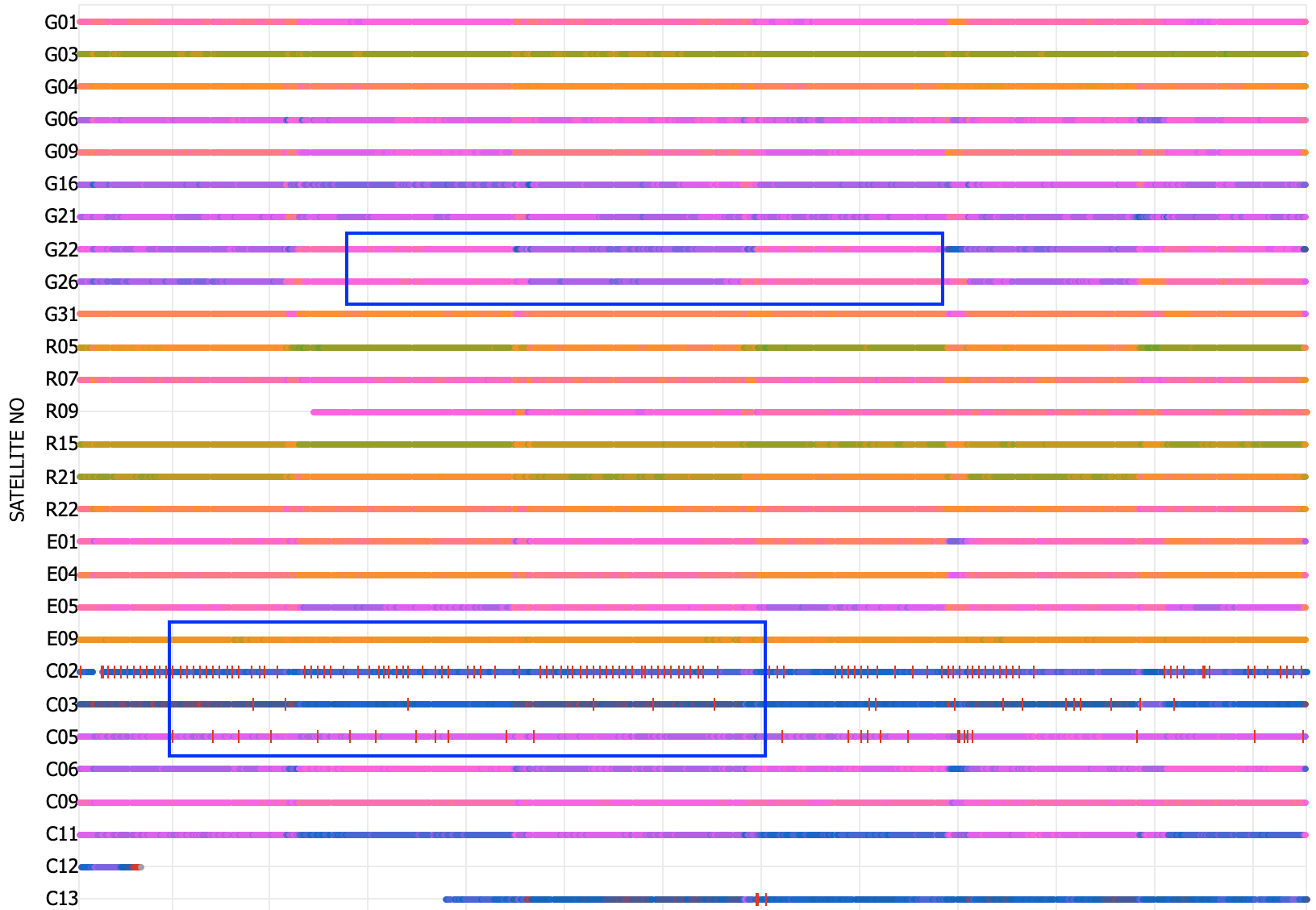
The logs from the base stations look good overall. As for the drone data, there are some cycle slips and periodical SNR level changes. It usually indicates RF interference:
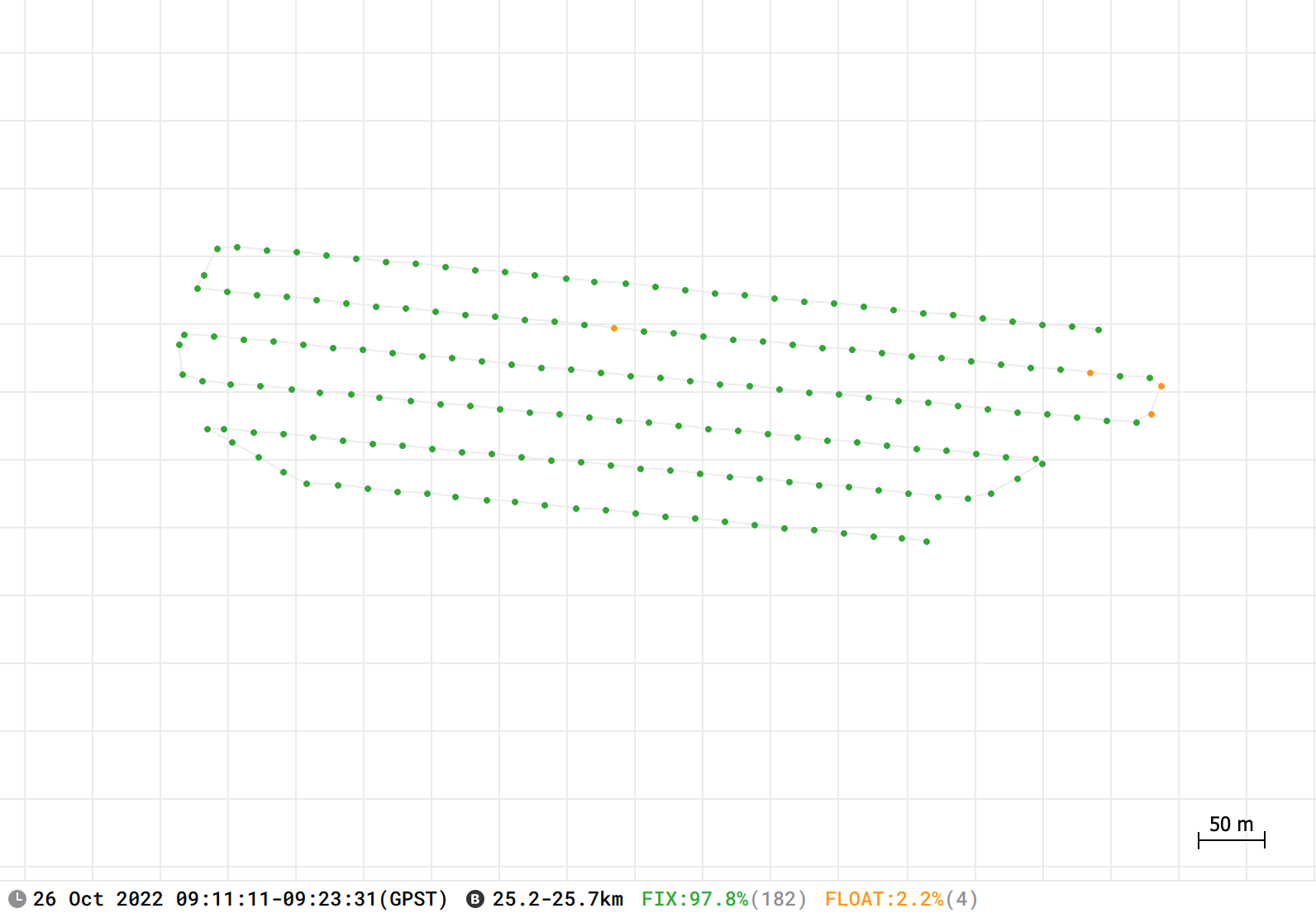
Still, the data is not bad, so I’ve tried to get more Fix solutions by adjusting the settings. For the first dataset, I could obtain 97.8% Fix by enabling the Combined filter type. It helps close the gaps between Fix solutions by tackling the job forward and backward:
For the second dataset, I used the same Combined filter and disabled all the satellite systems except for GPS. Sometimes, it may be better to disable some systems to remove bad quality signals from the calculations. These settings helped obtain 100% Fix solutions:
Hi Kseniia,
Thank you for your information. Definitely I will consider your remarks in future and hope my journey to PPK world will be sucesfull.
As you have mentioned the drone data had some RN interference during the flight. What do you think what is the cause of such interference?
Hi Lado,
In most cases, RF interference is caused by RF noise from drone motors and onboard electronics. When our users build their own drones, we usually recommend isolating the GNSS module and antenna to prevent it. But I understand it’s hard to change something in a drone that comes together as a complete unit, like Phantom 4 RTK.
Still, the interference is not strong enough to prevent Emlid Studio from calculating the Fix solution. Just keep in mind that drones are quite noisy, so you may need to play with settings for the best results.
2 Likes
Hi Kseniia,
Thank you for your information and help.
I will consider your tips
Best,
Lado
1 Like