



I’m having trouble getting accuracy on my projects, accuracy compared to the gcp on the ground is staying at 80cm to 1m.
I use reach module as a base reach rs as a rover to collect the gcp and reach m on a fixed wing, the fixed wing flies at 14m / s. sony a6000 camera with seagull flash shoe synchronization. the base used in the survey of the gcp is the same as the uav and the points collected on the same day and post-processed.
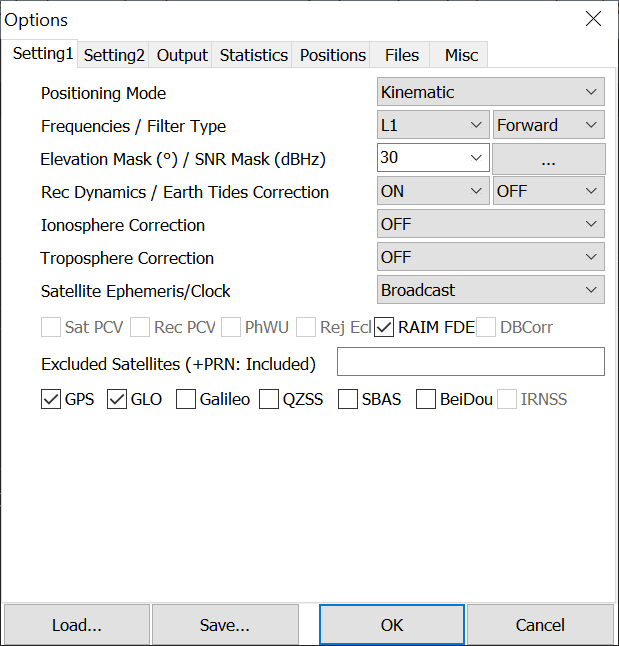
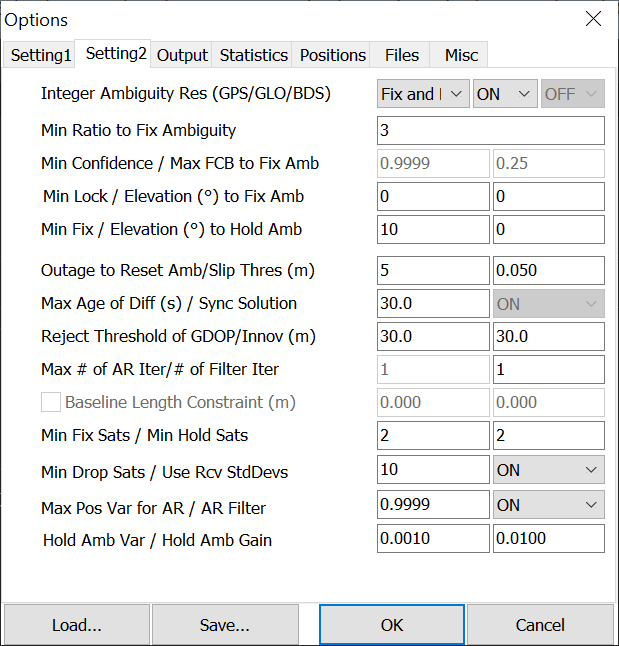
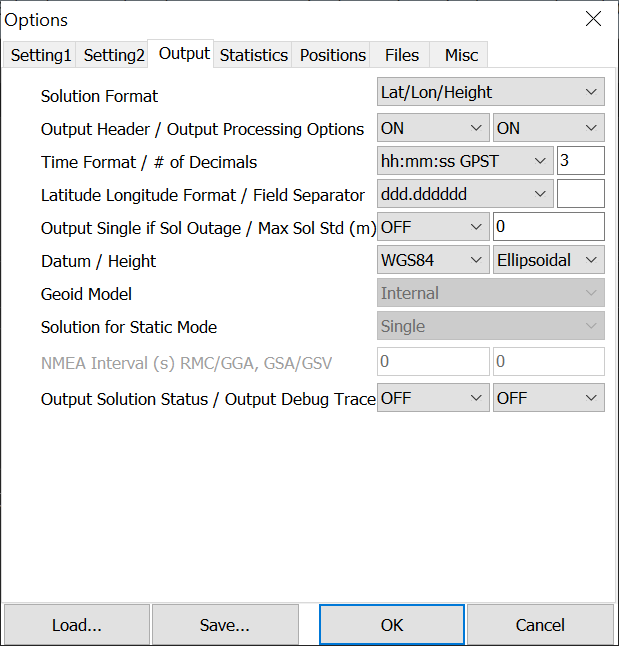
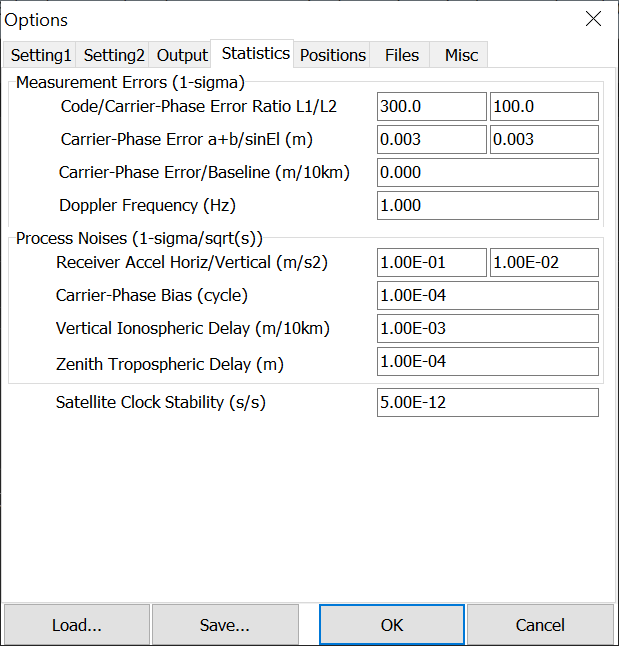
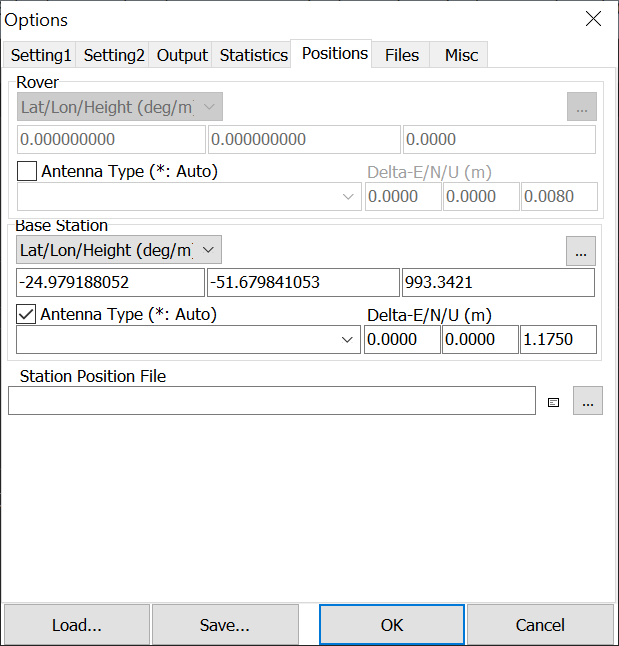
equal base coordinates, follows the report of the metashape and the configuration pages of rtklib, installation of reach m in uav
energy for reach m from a bec castle shared with radio rdf900 but with ferrite filters, grounding plan of the 10cm antenna built with pcb. metashape report ps I got good results only using the gcp, the accuracy of the cameras is close in the meter ,report without active control pointsrelatorio.pdf (4.0 MB)
Report with control pointshttps://1drv.ms/u/s!AgTCVcTndvUrgbwAI5NElcZcUb5oJA?e=iUawcP relatorio.pdf (3.1 MB)




Hi Bruno,
Thanks for sharing the detailed report. We’ll look into it and get back soon.
Hi Bruno,
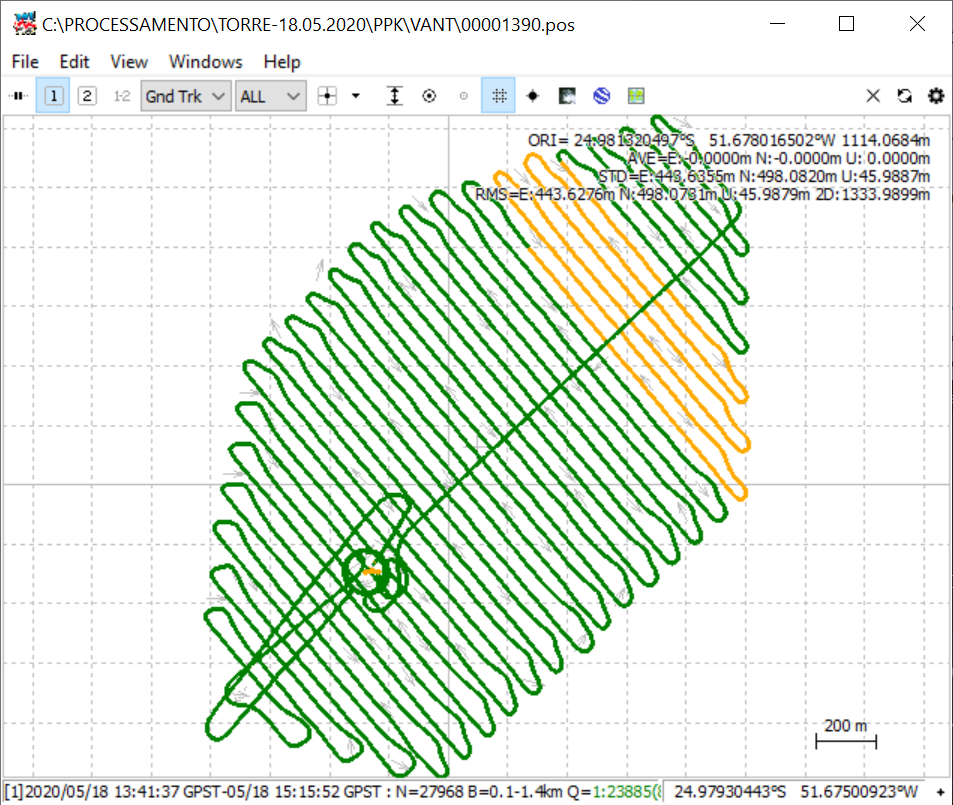
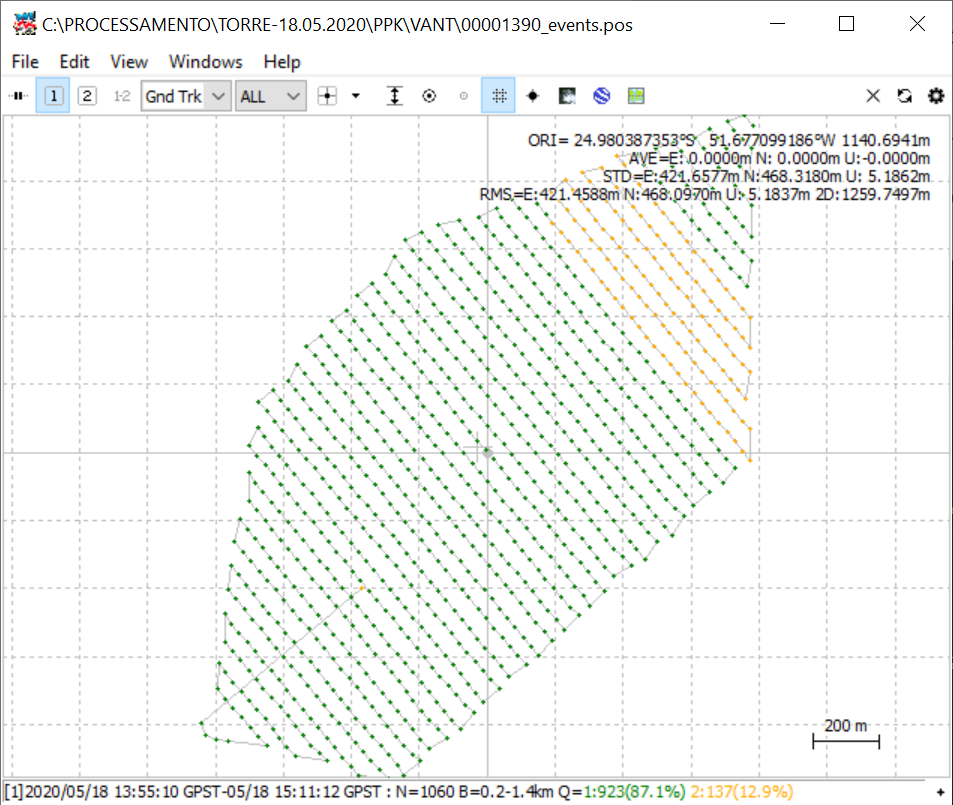
Could you please share your logs with me? I’d like to post-process them myself and try to figure out why there is a part with Float solutions only.
for sure soon I’ll post them
Olá Bruno.
Desde seu primeiro vôo está ocorrendo esse problema de precisão? Você está recebendo as mensagens da câmera (hotshoe) em seu geotag?
yes since the first flight, the flash messages are normal
I observed that your gcp are very sparse. Try process a gcp area exclusively and let’s see the results. If you want, post the .bin log.
Hi Bruno,
Did I get correctly that you use Reach RS+ as a base? Could you describe the conditions in which you placed the base?
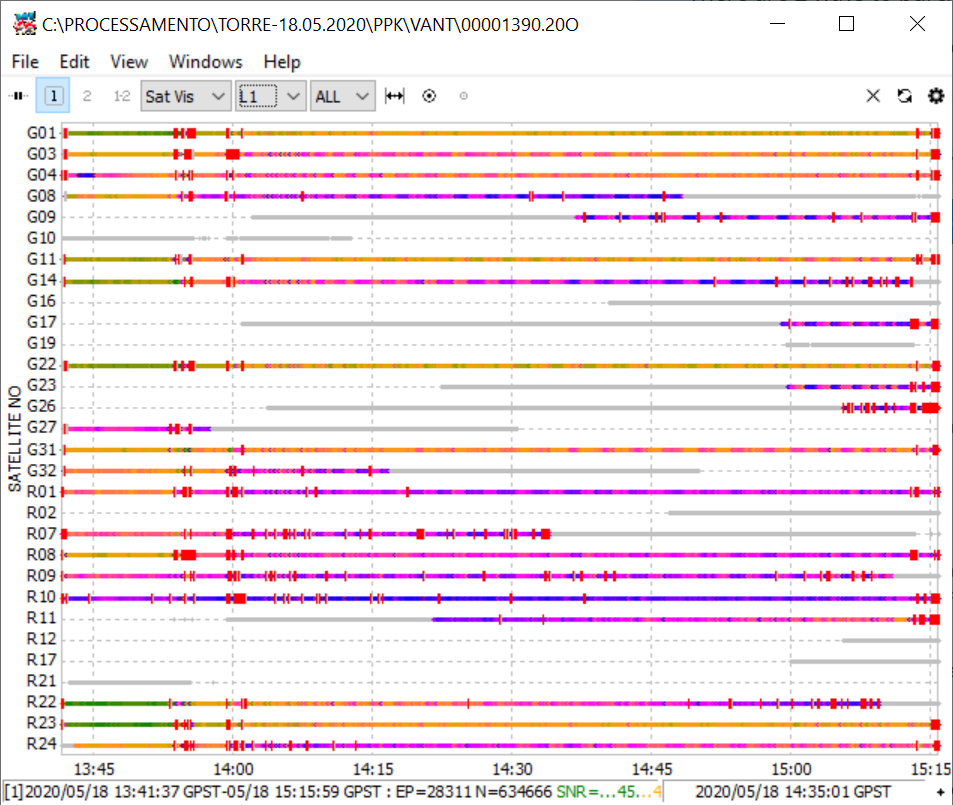
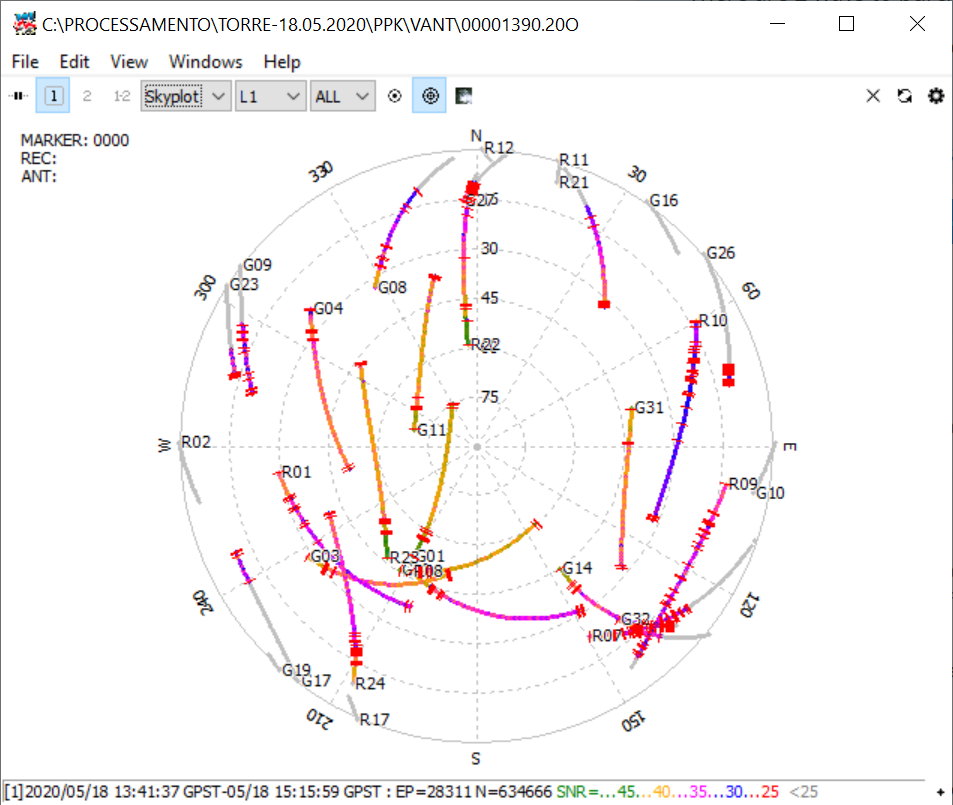
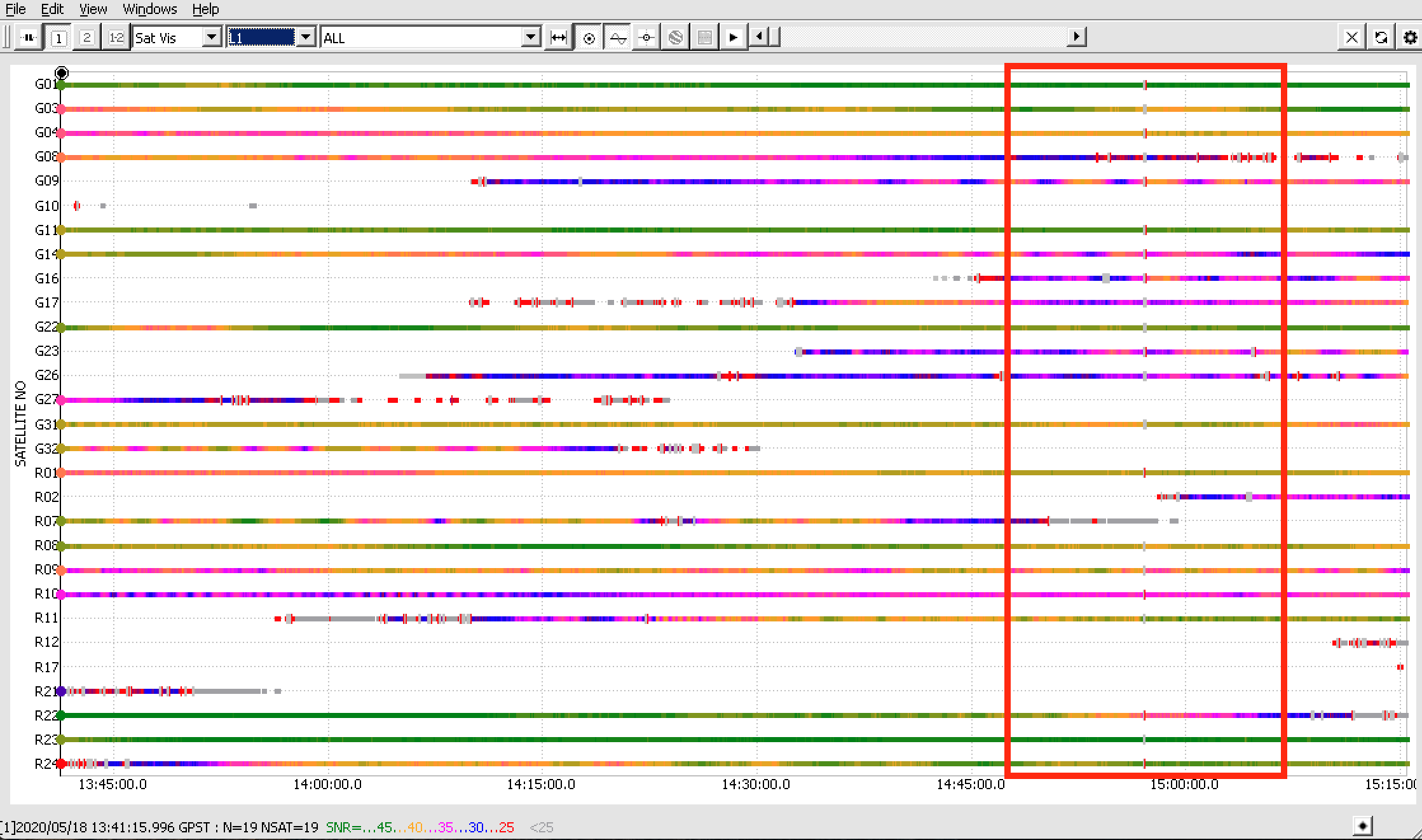
Please take a look at the screenshot below. There are cycle-slips and SNR value jumps for all satellites at the exact same time that you had a float solution. Any chance something blocked the sky view for the base?
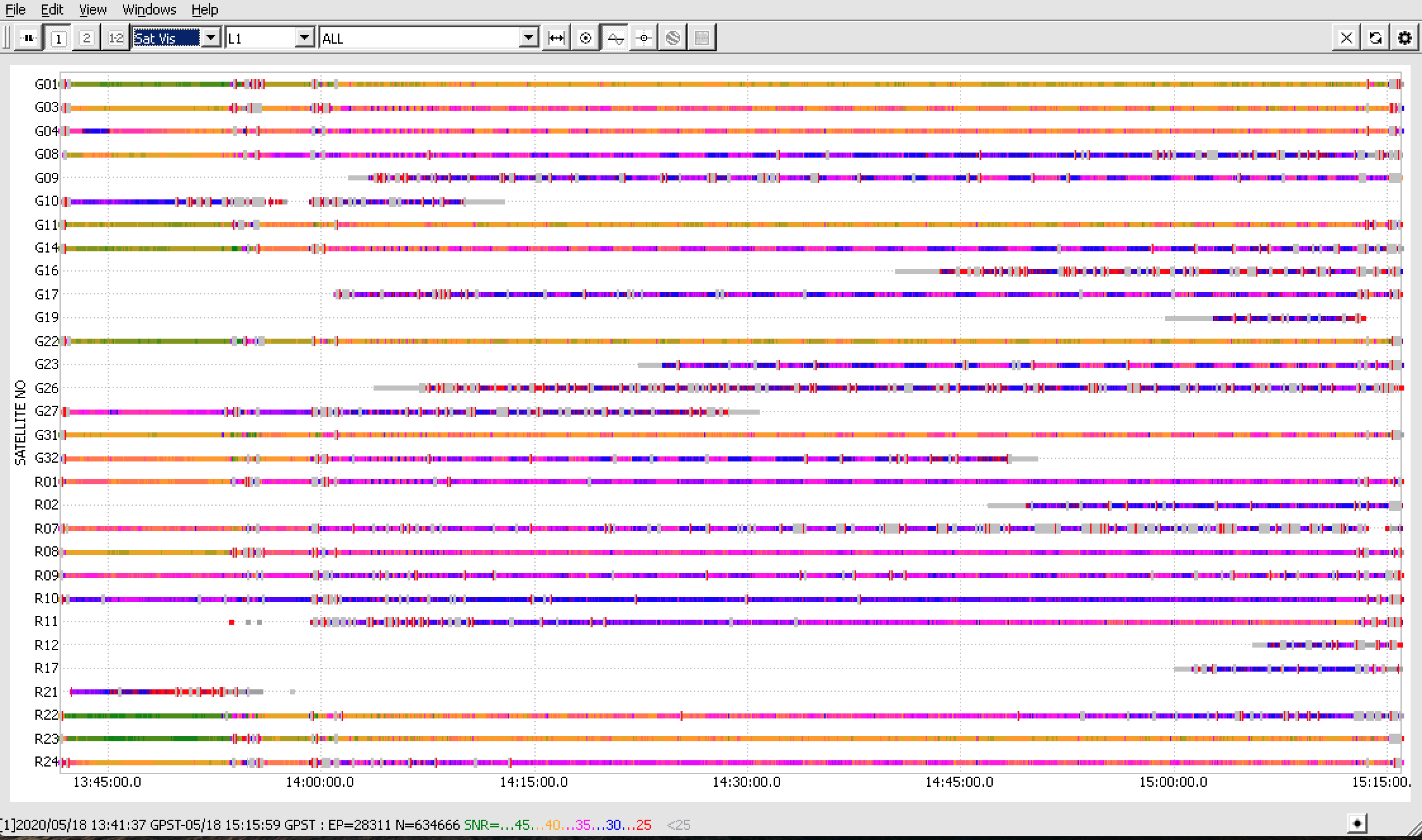
Also, the raw data from the rover is very noisy. We can see that some satellites had good SNR values during the first 5 minutes of the log. Then the SNR values are degraded and cycle-slips appear. I’d assume that this was before the start of the flight. If I’m right, it means that some internal components of your drone may affect the Reach M+ signal.
I’d suggest conducting a few tests, connecting all the internal devices one at a time, and checking how each of them affects the GNSS signal.
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.