Hello,
i have Navio2 flight controller running arducopter 4.0.3.
I have calibrated and setup everything.
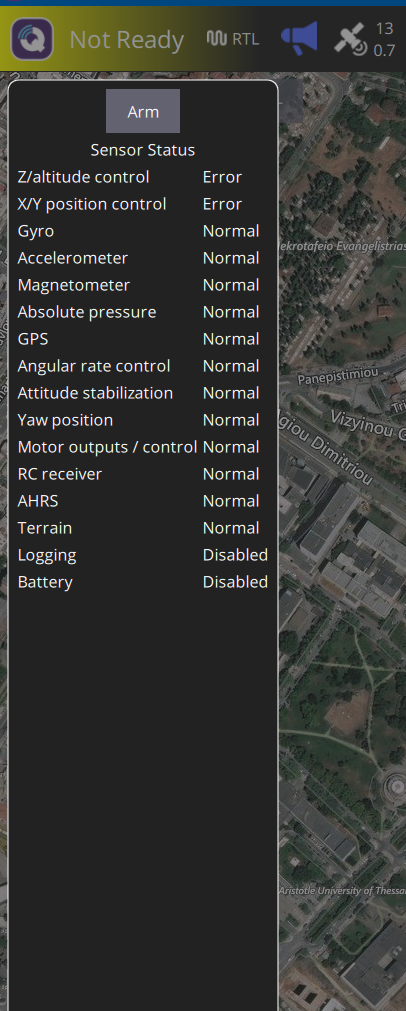
THe problem is that when I am in Loiter mode, in QGroundCOntrol software the pre-arm Status is always Not Ready and it shows that there are 2 errors (Z/altitude control error and X/Y position control error).
What do these pre-arm check errors mean ? How to fix them so that my pre-arm status become Ready ?
Thanks a lot
1 Like
Hi @drone_newbie,
Are all sensors marked green in the Sensor Setup section of QGroundControl?
hello,
yes sensors have already been setup and they are marked as green
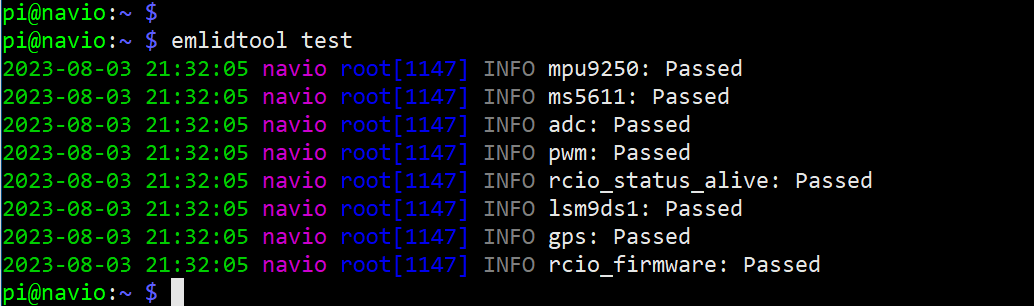
I see. Have you tried checking whether all the sponsors pass the internal Navio2 tests? You can use this command to run the tests.
hello,
running the emlidtool test command gives the following where everything seems to be fine
i have upgraded to ardupilot v4.3.7 and the pre-arm checks now shows normal. Bu ti have other problems i should mention in a separate post.
Thanks for posting the solution!