



Hi. Has anyone had consistent success (had an rtk fix for more than 80% of the time in favorable conditions, clear sky etc) using reach in a moving rover application? If so, please share your antenna setup and reach settings. Posting a video would be fantastic.
If anyone is using different antennas please post results also.
Thanks
To get the results below, the CORS (continually operating reference station) provider I get the base station data (via ntrip) from is using this antenna:
This antenna is 1.3km away from my rover emlid.
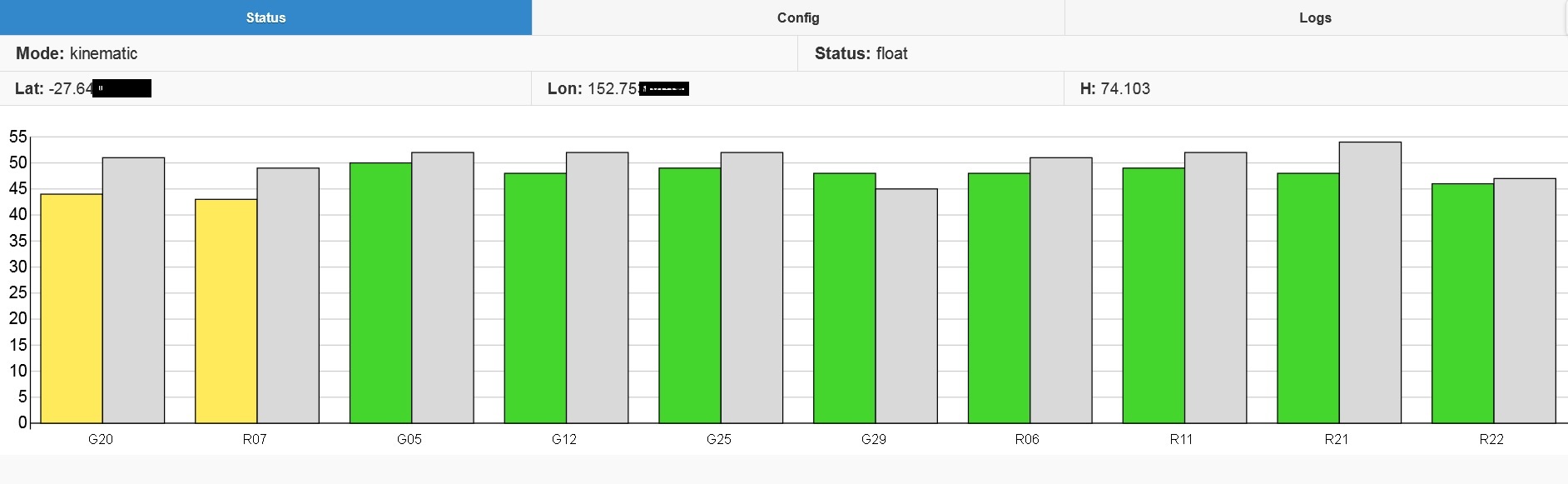
I can get a fix only about 1% of a day with the provided tw4721 (stationary) rover antenna on a clear rooftop (with large ground plane - a sheet of 0.5 mm thick steel 500mm square) and correction data from a commercial ntrip provider. Even when I have 8 satellites over 45 on base and rover. When I do get a fix, the accuracy is very good, at about ± 10mm
I have tried using straight gps but I find gps/glonass gives better results.
Is the Edison struggling, the software, or the do the antennas need even higher snr?
Here’s my settings:
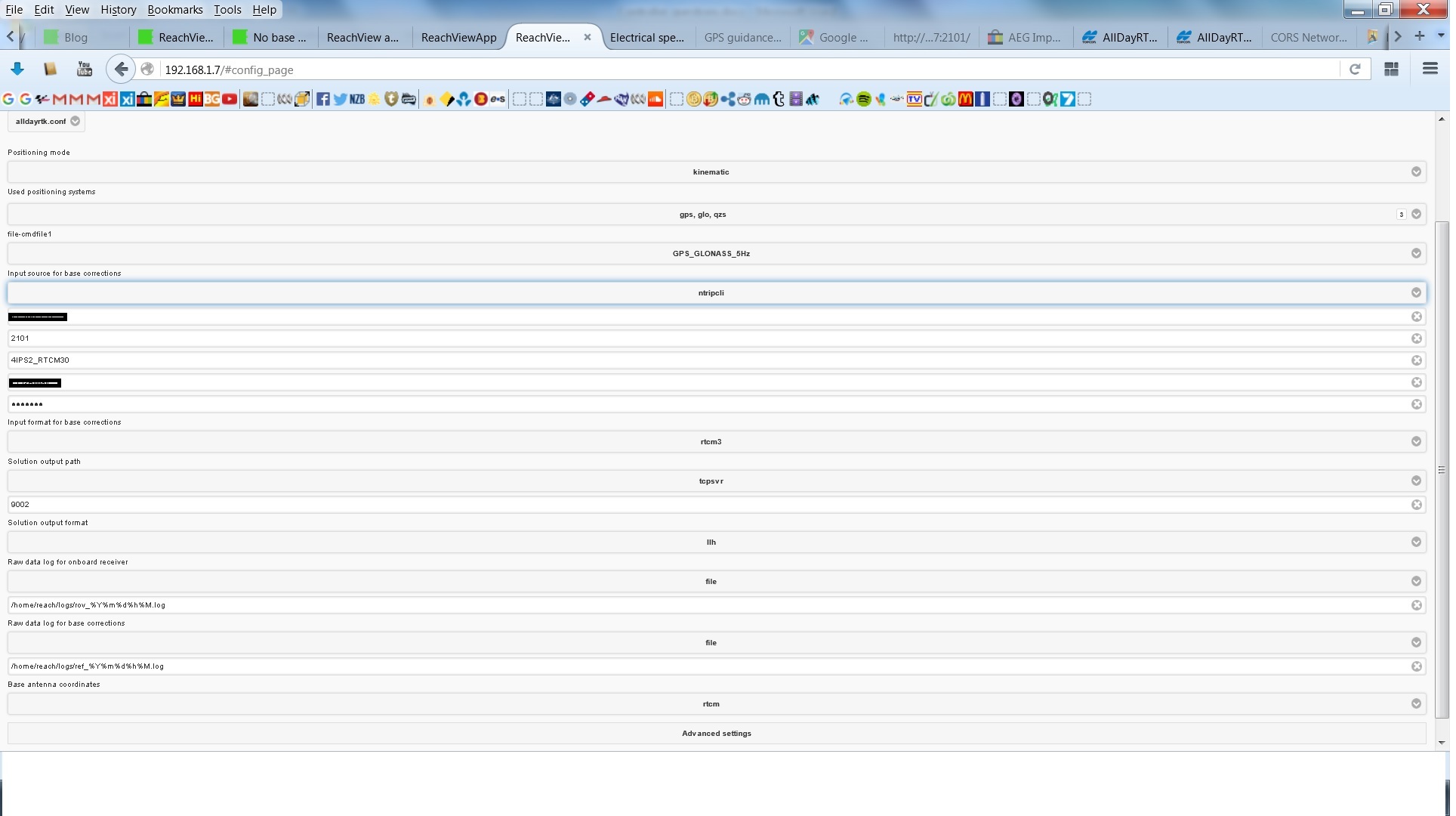
Almost always in float:
UPDATE:
I have found that if I switch the rover “file-cmdfile1:” setting from GPS_GLONASS_5HZ to GPS_14HZ ie purely gps, even though I get less satellites with adequate signal, a fix is computed about twice as quickly when there are enough green satellites. (And it drops back to float quickly when there are less than 6 green, stable satellites.)
Either a bug or more processing with gps/glonass? Reach may not even be using the glonass satellites to compute a fix in gps/glonass mode ? Will my southern hemisphere location influence the calculations? Will a glonass only setting be released? (if only for testing purposes)
Here’s a video of everything working as well as I can get it on a stationary rover antenna, during the evening when satellite signals are strongest. It drops out of fixed when a couple of GPS (ie “G10, G15” etc) satellites are a little unstable. The GLONASS ("R01, R08 etc) satellites stay relatively solid.

Here’s the challenge: “beat” this and show us how.