APM planner tells me the RC is not turned on and I see nothing on the slider bars.
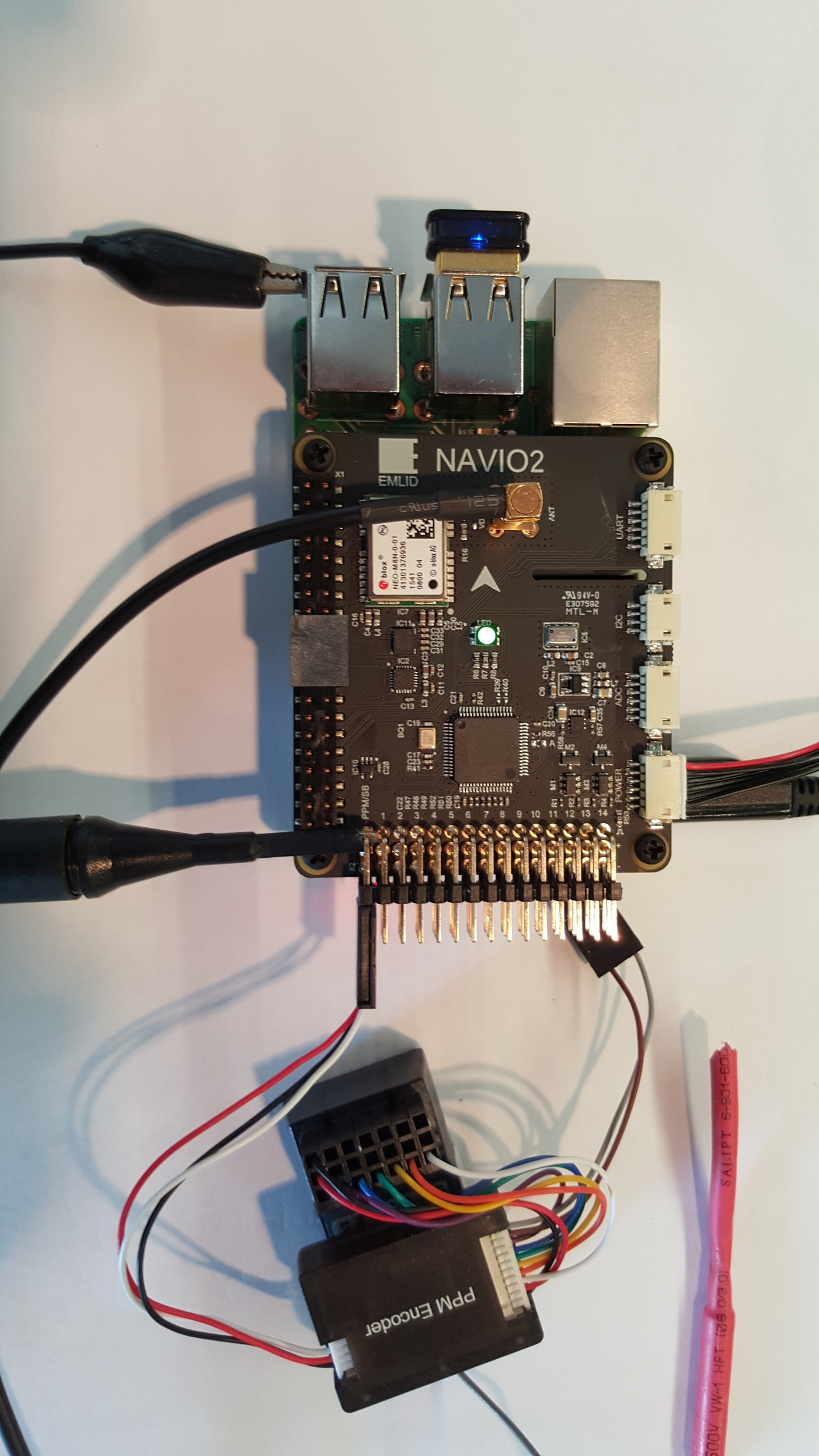
This is for a RaspberryPi2 with the latest EMLID image (20160212) for the Navio2.
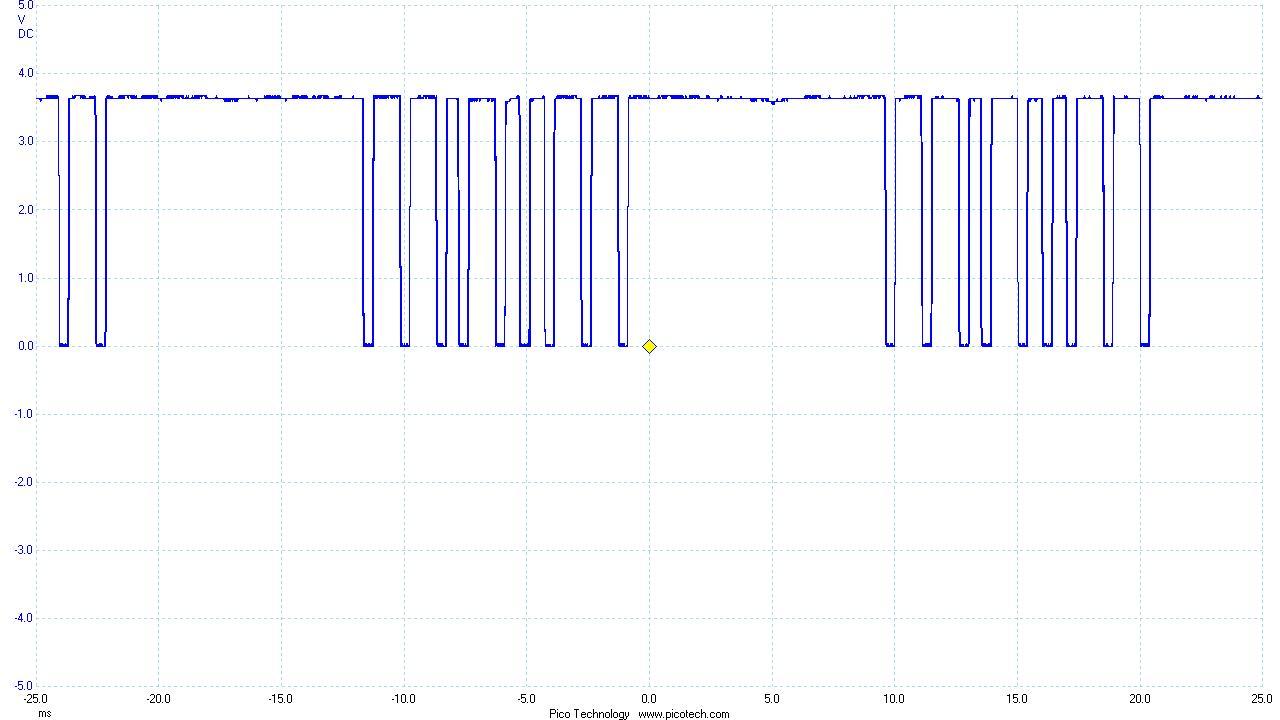
PPM encoder seems to be working, scope shows 0 to 3.5v pulses. For the 4 channels connected the 4 pulse widths change with stick movement (0 - 12ms within the frame). I have a large “blank” space (12ms to 25ms) where the encoder is obviously expecting input channels 5-8. Is this the problem? Or should it be a 5V output?
Then ls. This is where you’ll see the channels. You can look into your problem a little bit by moving sticks and checking if the values you see in the directory you just issued you command in, do match. I’d be very surprised if they don’t.
Mission planner is forcing me to upgrade firmware? I assume that won’t work?
Installed whatever version was linked to on your page yesterday.
New link has an error on install:
“trying to overwrite ‘/opt/apm/bin/ArduCopter-hexa’, which is also in package apm 3.3”