I’m looking for advice on optimal rtkpost settings. I am attempting to create a trail map for a local park (extracurricular activities, haha, also good practice). What I did, was I put the Reach RS2 on a short 1’ pole, put it in my backpack then walked all the trails. It was inside the backpack, not sticking out. I logged rinex data the whole time.
Then later i downloaded free base data from a local commercial supplier and then executed a post processing session in RTKpost. I got a fixed solution when I was in the open parts of the trail (no surprise), but mostly “single” in the forested parts. Now, I know I’m splitting hairs at this point since this is only for a trail map and is fine as is, but I’m looking for advice as to the optimal settings for RTKpost to improve this result for future “real” work. I have shared an image of my solution, the config settings I used, and the rinex data from the commercial base and the Reach RS2 rover i was using.
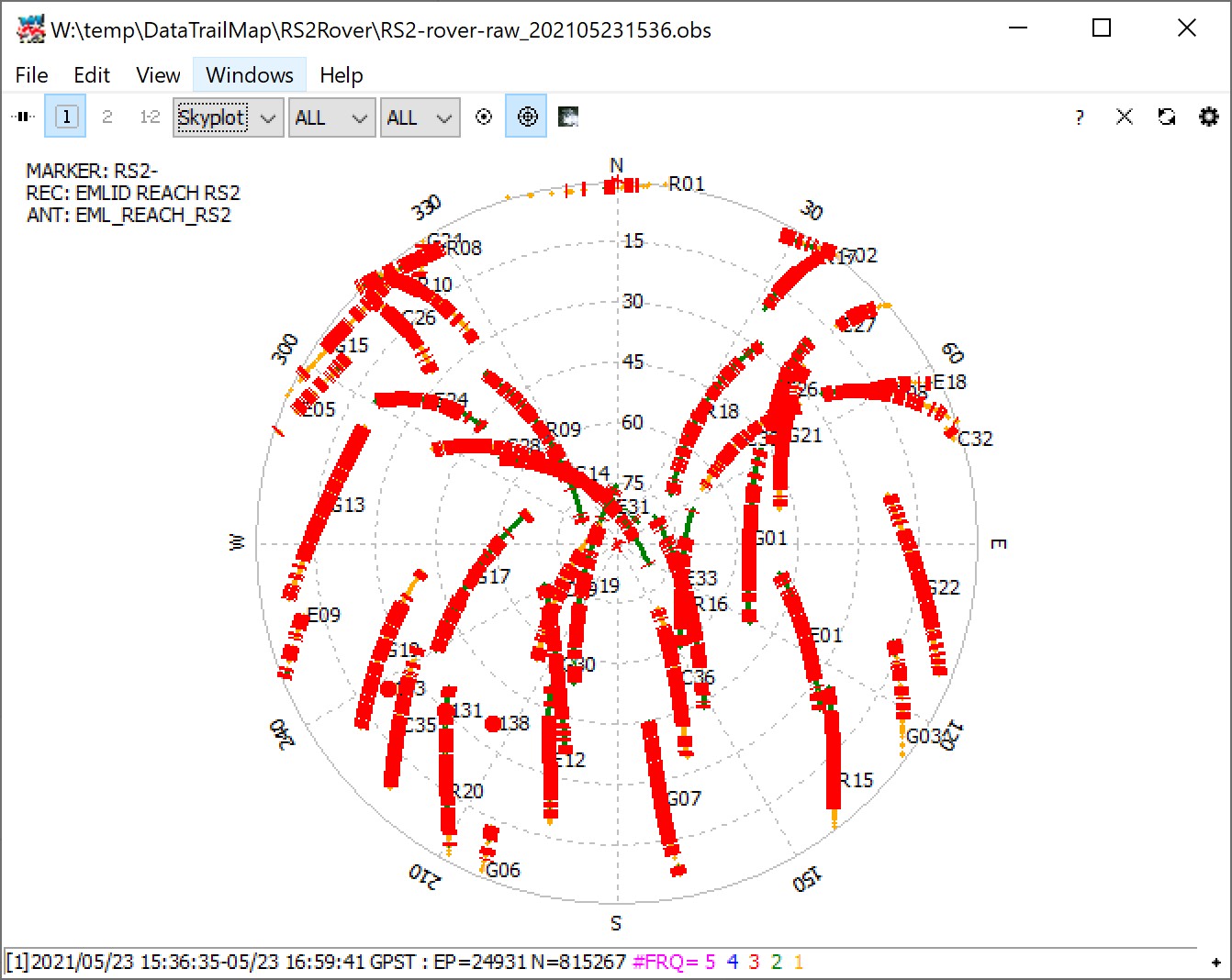
GNSS receivers require a clear sky view to track satellites and calculate centimeter-accurate coordinates. There should be at least 5-6 common satellites between base and rover to get a Fix solution even if you work in PPK.
Reach RS2 is a multi-band device that can handle some trees and buildings nearby. However, most of the sky is blocked under a heavy tree canopy. It prevents GNSS receivers from getting an accurate position. There is no much we can do with RTKPost settings if logs were recorded in the forest. However, please let me know if you face any issues with a solution status in an open area.
Also, we always suggest placing the rover as high as possible to increase its view angle above the horizon. So, I don’t recommend putting Reach RS2 inside the backpack.
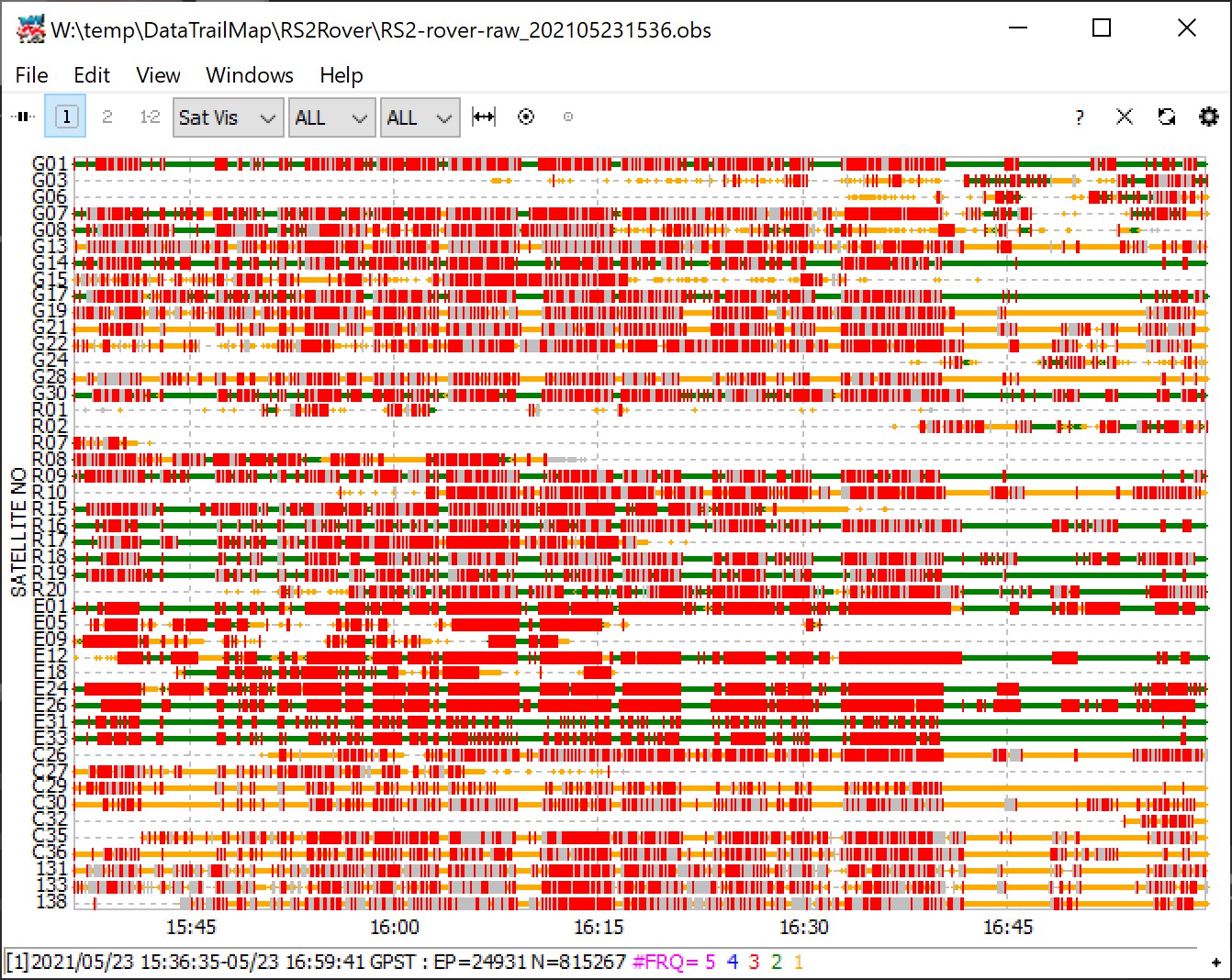
All the Red vertical lines are Cycle Slips. Each time a cycle-slips occurs for a given satellite, the sat cannot be used until reinitialized. So, if you are on 4 sats on GPS, and you experience a cycle-slip on 1, you will also loose your fix.
For your trail setup, may a suggest a trolley or something along those lines? Yes, people will look weird you (don’t ask how I know it!), but hey, it’s all about the data-quality
Students here went to map a trail with an RS2 two days ago. I told them to get half a rover pole and hold it like a scepter so the receiver would be over their head.
This is all really good information, thanks folks! So it seems I should redo it either with a survey pole scepter-style (LOL), or at least with a short pole sticking out of my backpack with the RS2 mounted on the pole at least above my head.
Wizprod, your solution looks better than what I was able to obtain, mine looks a lot more “noisy” with many single solutions only. I had 22% fixed, 41% float and 36% single. I don’t have access to effigis, only rtkpost. Any idea how I could obtain a better solution using RTKpost? Obviously I need to redo the walk for the best results, but just interested in optimization of processing. Is there an equivalent of the solution term “L3 (iono-free)” in RTKpost?
In this thread, we were discussing optimal settings for post-processing. Now, we have Emlid Studio – our post-processing software. Its default settings work fine for most cases. And most commonly, you don’t need to think about it at all.
But if you need to play with the settings, the menu was optimized and had fewer parameters now.
Of course, it can’t handle everything and still requires data quality to be appropriate. But if you have any questions or difficulties, don’t hesitate to create a new topic. We’ll be there to help!