Hi !
I’m having trouble understanding things about PPK from an emlid base to an emlid rover ( and DJI M3E )
Here’s the setup :
RS2+ is setup as a base on a known point ( 2 min average with RTK correction from my provider )
It’s height is mesured at 571.453m ( 2,134 antenna height )
RS3 and Drone are collecting data via EMLID NTRIP but sometime i’m loosing corrections due to the poor cellular coverage here. That’s why I decided to use all the observations files from the rovers and my Emlid Base to get these in PPK .
I’m used to do it with IGN BASES ( Like CORS bases ) and it works well.
But today, i’ll use my OWN EMLID Base ( The RS2+ ) to correct my rovers.
And here, nothing’s working good …
When I use " Stop and Go" to PPK my RS3 from my RS2+ I’m loading :
ROVER : rover.O ( "Antenna height will be taken from CSV file " = 2,134m )
BASE RINEX :
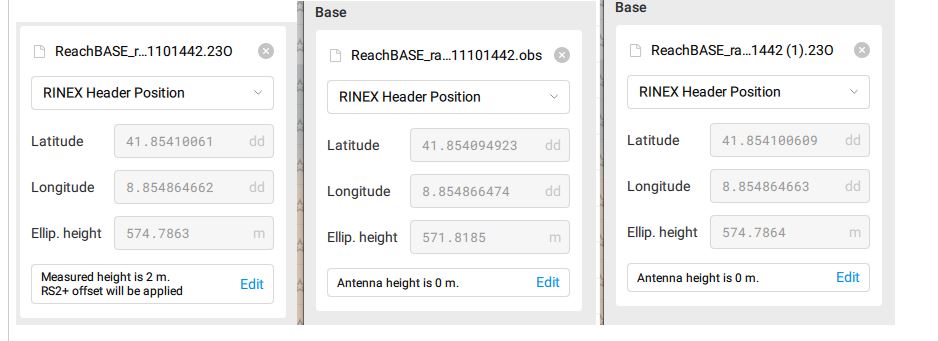
base.o is giving me 574.786 m in Z with " Measured height is 2m, RS2+ Offset will be applied"
base.obs is giving me 571.818 in Z with “Antenna height is 0 " or " Measured height is 2m, RS2+ Offset will be applied”
base.UBX is giving me 574.786m in Z with “Antenna height is 0 " or " Measured height is 2m, RS2+ Offset will be applied”
Navigation file : should I use base.p or base .nav ?
I’m really confused with the heights i’m reading, none of these correspond to my known base point of 571.453m + or - 2.134m
Can someone help me / teach me how to achieve this PPK ?
I’m also having this questions for the “Drone data” part …
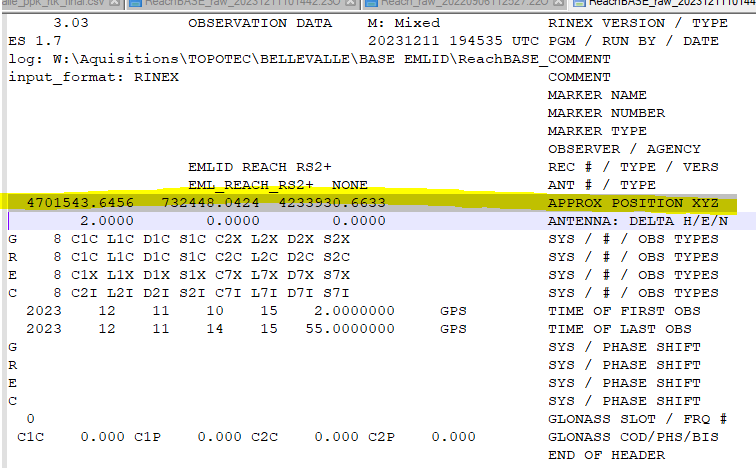
Now I understand why emlid suggest to manualy input the known point location on the emlid flow app : Beacause the point recorder in the header is “approx”.
I could be good to be able to have this point accurate when recording starts on a known point setup manually on the emlid flow app. Or maybe add a feature to input it after.
Also, can someone tell me what’s the format used for these kind of coordinates in the header ? They are not DD neither DMS or Projected, what are they ?
These are geocentric (Cartesian) coordinates, expressed in meter.
In your case these correspond to:
$ ./cs2cs +proj=geocent +datum=WGS84 +to +proj=latlong +datum=WGS84
4701543.6457 732448.0424 4233930.6633
8d51’17.513"E 41d51’14.762"N 574.786
West coast of Corsica?
The position you see in the RINEX header represents the last calculated epoch coordinates of the base. Therefore, it has only an accuracy of several meters. That’s why you experience the difference from your known coordinates.
Despite this, you can ensure accurate coordinates for post-processing. For that, you can add the known coordinates of the base directly in Emlid Studio.
Regarding the navigation file: both base.p and base.nav contains navigation data from all GNSS systems, therefore it makes no difference which one you use.
As @maarten.vergauwen also mentioned, the coordinates in the header are geocentric coordinates, with XYZ values, in meter.
Thank you for your suggestion. It’s always useful to know how we can make things more convenient for the users. We’ve noted it and we’ll consider it in the future.