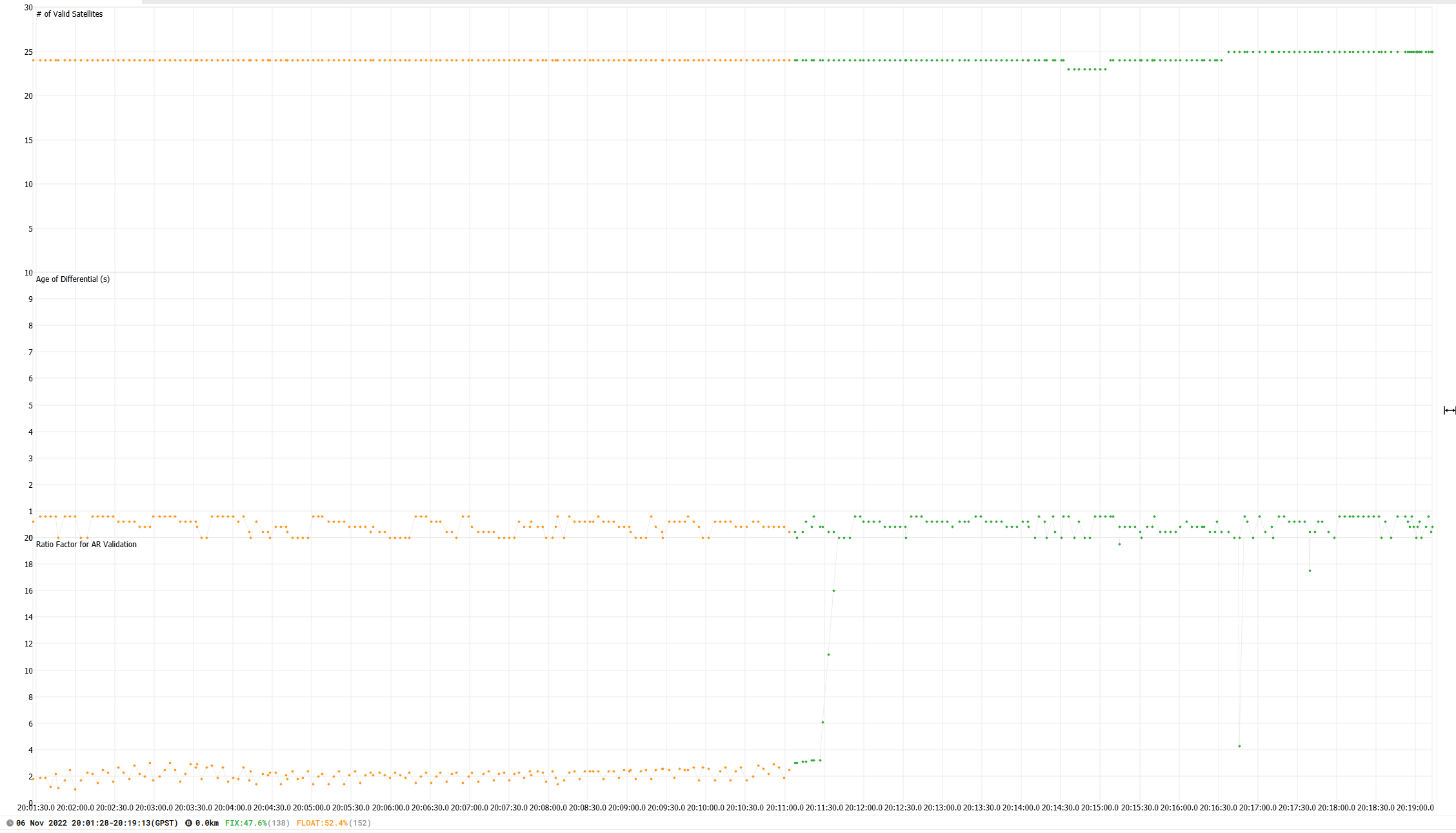
I did my first mapping flights with the Mavic 3E and RTK module recently. I had a RS2 base on a known point collecting raw observations all day (1hz). I did 5 mapping flights and PPK processed in Emlid Studio. All were 100% fix except my first flight of the day didn’t achieve fix (only float) until halfway through. I’ve reprocessed several times with UBX and RINEX etc and get the same results. I’ve done quite a bit of PPK processing with M300 and never experienced this. Seems it could be an issue with the Ratio Factor. Any thoughts?
(PS Ran low on battery and had to land and change battery before completing the mission. Second portion was 100% fix)
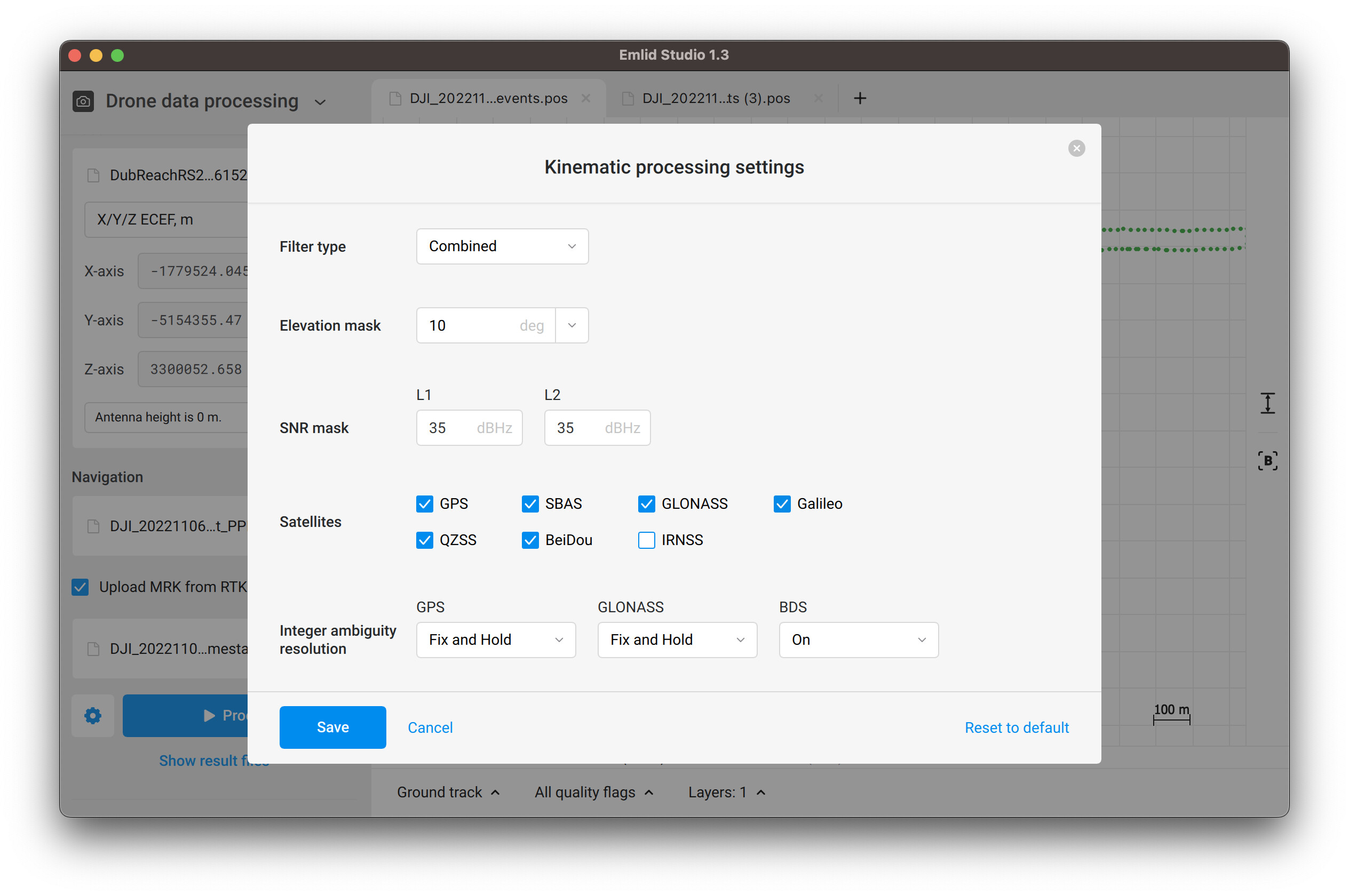
There’s an ability to improve results by playing around with the settings in Emlid Studio. You can set Filter type to Combined, increase an elevation mask to 10 degrees, and set Integer ambiguity resolution for Glonass to Fix-and-Hold. I achieved 100% FIX by applying these settings as shown in the screenshot below:
I apologize if this isn’t the right place to ask this question, but I couldn’t find the answer anywhere else.
Does the Mavic 3E store the raw GNSS files when shooting in manual mode? The Phantom 4 RTK cannot do this and hence it is impossible to do PPK in a manual workflow.