Hi - added here into this post is all the data captured in the field. I took 6 total ground control points (PPK Post Processing), and only 3 looked correct in the LiDAR data after PPK Post processing from the ROVER. In the Misalignment GCPs, youll see GCP4 is off by 20 feet. GCP5 is off by 5 feet. GCP3 is off by several feet. Then you will see GCP 1, 2, and BASE are accurate in the expected ground control. all ROVER points from the survey were successfully ‘fixed’, so I dont know why some of them are so off and some of them are exactly on point. please let me know if there’s anything additional i can add. thank you for taking a look at this!
Thank you! I was thinking recently that there may have been an issue due to not changing the default coordinate system in the survey project on the reach RS2 (ROVER). I noticed the default is ‘Global CS’, when it really should be WGS84 / UTM zone 10N (32610). Could this have played a role in the inconsistent GPS Rover Accuracies?
I’ve processed your files but achieved Fix just for 2 of 5 points in Stop & Go mode. What settings did you use in Emlid Studio?
I also see that your base tracks GPS, GLONASS, and Galileo. However, the rover’s log contains data from GPS only. Is it so for a specific project? If not, I’d recommend you enable GLONASS and Galileo tracking in GNSS Settings as well. It’ll give you more data for processing.
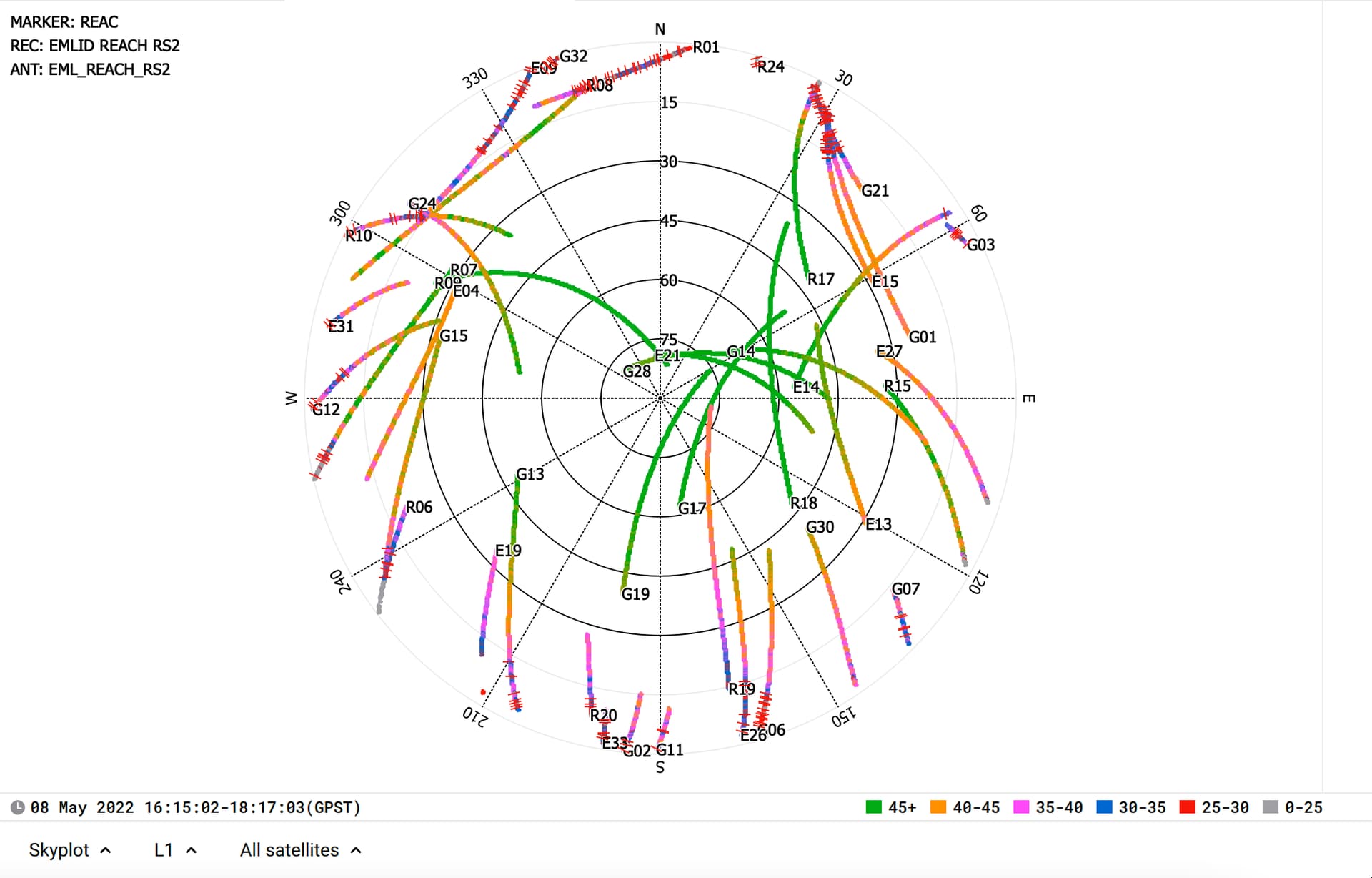
Another thing that I’ve noticed is a lot of outliers in the raw data from the rover for all the satellites. It looks like the device is greatly affected by multipath. Where are you working with the rover? Are there any obstacles or reflective surfaces nearby?
The difference in coordinates may be caused by comparing data from different coordinate systems. But in this case, all the points would have nearly the same shift.
The coordinates of the points in Stop & Go in Emlid Studio are always geographic. Their coordinate system depends on the datum of the base only. So if you set base coordinates in Emlid Studio in WGS84, you get the rover’s position in it as well.