We are currently working with Reach RS2 (base and rover), mostly in PPK and without any internet or NTRIP. So far we have worked on relatively small territories but we are hoping to expend this. I have read much documentation but I’m still trying to establish best practices in terms of maximum distances or baseline between base and rover.
As I understand it, the Reach RS2 using LoRa (only through the device hotspot) has a maximum transmission of about 8 km, which would be the mark for a RTK mode survey. However, I can’t seem to find a number for PPK mode. Since both reach do not need to communicate together but still need to see approximately the same satellites, I am wondering what would be the benchmark distance in that case?
Also, I have read on Emlid’s website that the Reach can get a baseline up to 60 km for RTK and up to 100 km for PPK. From my understanding, these numbers were only however if you had access to built-in modem (SIM card) or wifi connection. Are my assumptions correct?
First off, LoRa is radio frequency and does not require any internet. You simply need line of sight between the base and rover. I haven’t seen much better than 3.5km due to my terrain but perhaps you could get up to 8k with perfect conditions? You could use the Emlid Caster if you have internet at both the base and rover and work up to 60km baseline in RTK. And like you mentioned, you can do PPK up to 100km as well and this can be between your RS2 base/rover or you can just log at your rover and do PPK off a publicly available base (depending on where you are working). Then you’d run stop and go in Emlid Studio. You do NOT need internet or LoRa radio for doing PPK.
I really recommend slide 26 from this presentation:
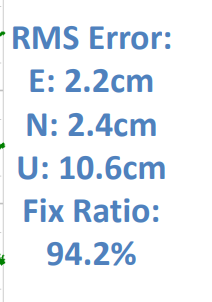
Try as I might, I couldn’t quite get a picture of the slide to post here when using my phone. Anyways the slide shows ppk processing of a dual frequency receiver with results at 0.3 km, 13km, 32km and 60km. On one end of the spectrum at 0.3km, you have an RMS of less than 1cm and a fix rate of 99+% and at 60km you have and rms of >10cm and a fix rate of 44%. Basically it shows the farther you are from the base the less accurate the fix will be and harder it will be to calculate a fix position. This is due to the fact that even though the receivers see the same satellites, the father you are from the base station the travel path of the signal through the atmosphere becomes increasingly different. This means that the double differenced correction from the base station for that signal becomes less accurate.
F9P (the chip in the RS2) accuracy is stated at 0.7mm +1mm per km (at 50% CEP - meaning 50% of the readings fall in the error circle). So your projects required accuracy could give you the upper limit in baseline length.
But needed accuracy not withstanding, could the RS2 give you a fix at 100km with ppk? The 100km ppk on the website is certainly an upper limit under the most ideal conditions (wide open sky view) and you are able to have long static occupations. I once came across a formula for how long you should occupy a site based on baseline length here in the forum. Maybe someone will have it on the top of their head. But at this distance I think you would be at high risk of getting unusable or unreliable results. You would also need good ppk software for that kind of distance and need a solid QA/QC plan (repeated observations at different constellation configurations and visiting know benchmarks).
In practice, I think you would find that 40-60km represents a more realistic upper range for ppk.
As I understand it, I could be working up 100 km in ppk (with my own base or public reference station) but to have the best precision, I should limit myself to a 40-60 km baseline.
Then, that means that is using RTK mode with internet and caster, 60 km base is pretty much the limit. What would be the best distance-precision compromise baseline ?
Checking the presentation @Africawaterdoc shared took me a while! The first thing I noticed is that they were testing single-band M8T and M8P chips there. For single-band devices, 60 km baseline in PPK is indeed way too long. We suggest using our single-band Reach RS+ only up to 30 km. On larger baselines, a single-band device won’t have enough data to calculate centimeter-accurate results.
With multi-band devices, the maximum RTK and PPK baselines are 60 km and 100 km respectively.
RTK baseline isn’t linked with LoRa baseline. LoRa has such limits because it’s a low-powerful radio, and its signal just can’t reach larger distance.
Hello everyone!
Thanks @Africawaterdoc for such an interesting presentation.
Worth mentioning that those results shown in slide 26 are for 24 hours measurements. Very few of us ever attemp such a kind of measurement. For “normal” measurements the errors should be great.
Best regards
Diego