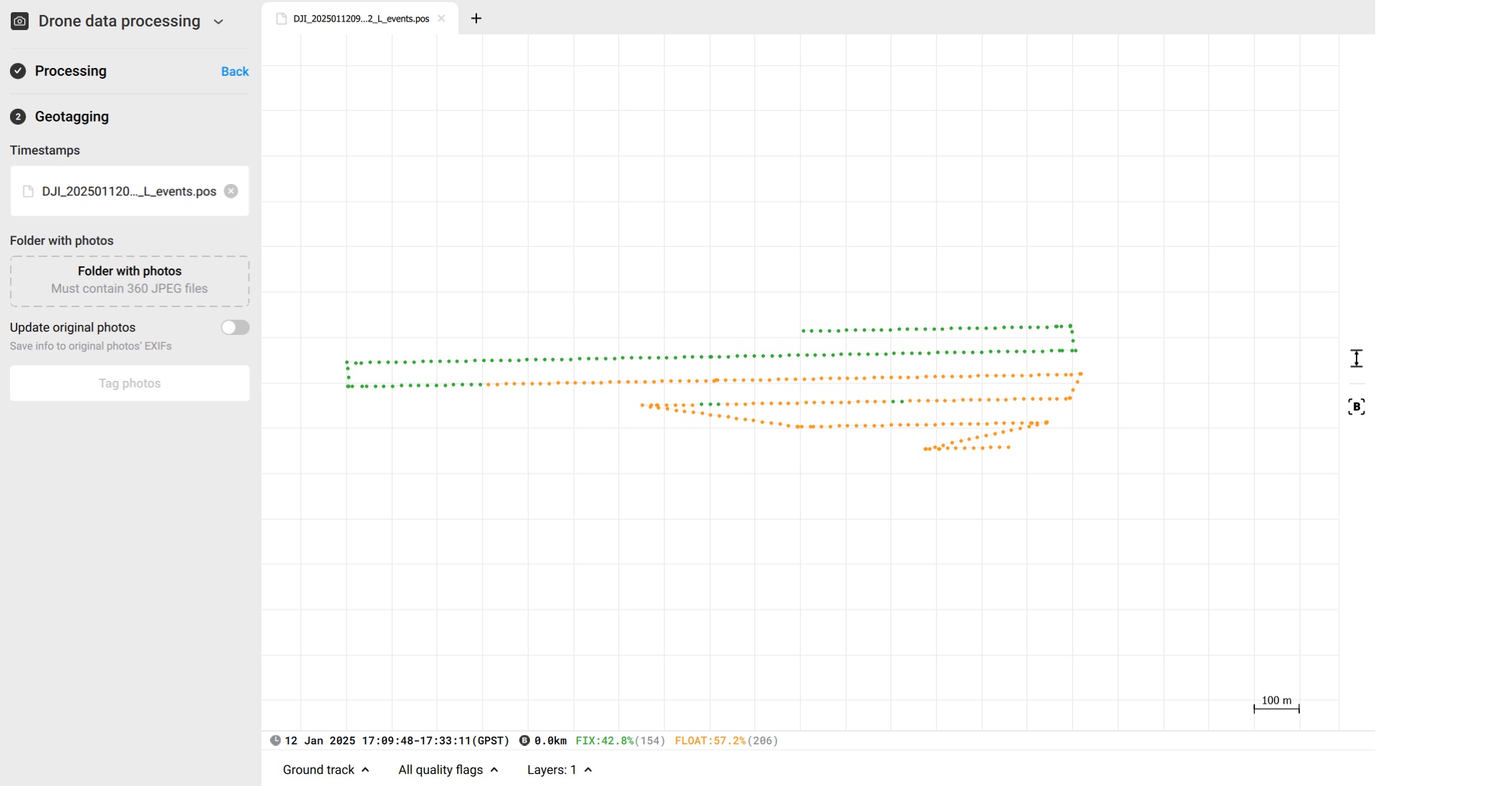
Hello everyone. I am running Emlid Studio 1.9 and am trying to post process DJI L2 data. My RS2+ indicated that I had an RTK fix throughout the flights (there were 3 separate flights for this mission), but the first flight shows that 57.2% of the positions were in FLOAT. Here’s the satellite data for the first flight:
I changed the name of my rover (drone) .RTK file to .rtcm3 and converted it to produce two files, a .250 observation file and a .25P navigation file.
I recently upgraded to an RS2+ and tragically forgot to check all constellations for my base GNSS raw logging and only had GPS satellites for my rinex base file.
So I downloaded correction data from the nearest state CORS network. I input those files into Emlid Studio to obtain a fix for these positions, but still have the same issues with 57.2% float. It also says that my base is 0.0 km away. The CORS data that I’m using as my base was actually 20 km away.
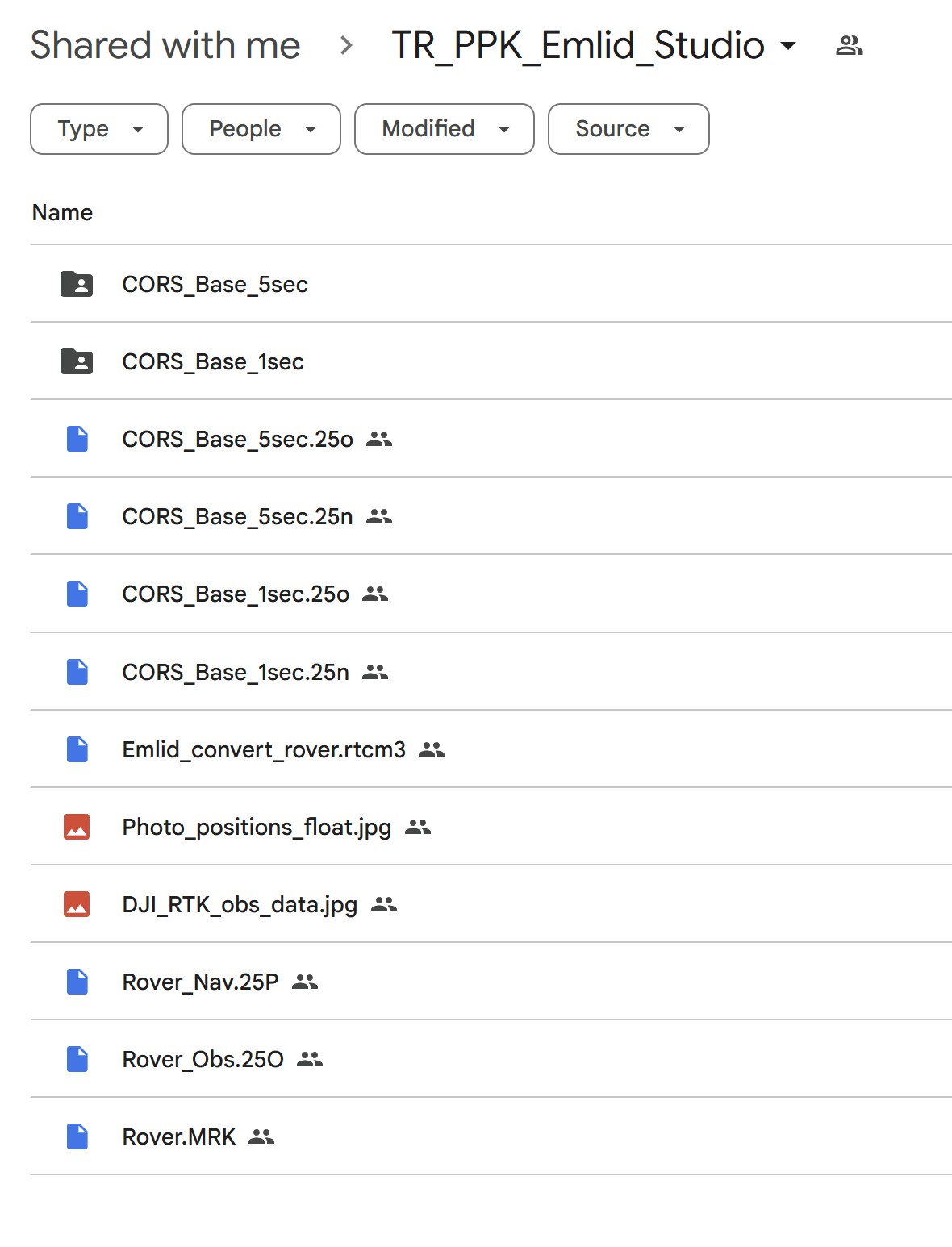
I made sure that I downloaded CORS data from times that overlapped with my rover files (.250 and .MRK). Per the link above, I used the state network observation and navigation files (.25O and .25P) in the conversion process. Am I missing something in this process? My files are here
However, it is just 30 sec interval data, which leads to a lot of interpolation being done as compared to the 5 Hz data from the Drone.
Do you have the UBX file? Then you also might have the higher rate data? 1 Hz is fine for the base.
That yields an even better fix ratio (getting first fix earlier). I’d go with the Emlid as base for the drone data. Then you can likely use the CORS as base for the Emlid, for calculating the position of the Emlid receiver.
Wow. Great. Can you elaborate on what you mean by “then you can likely use the CORS as base for the Emlid, for calculating the positon of the emlid receiver?” Would I do that in Emlid Studio, in Kinematic processing?
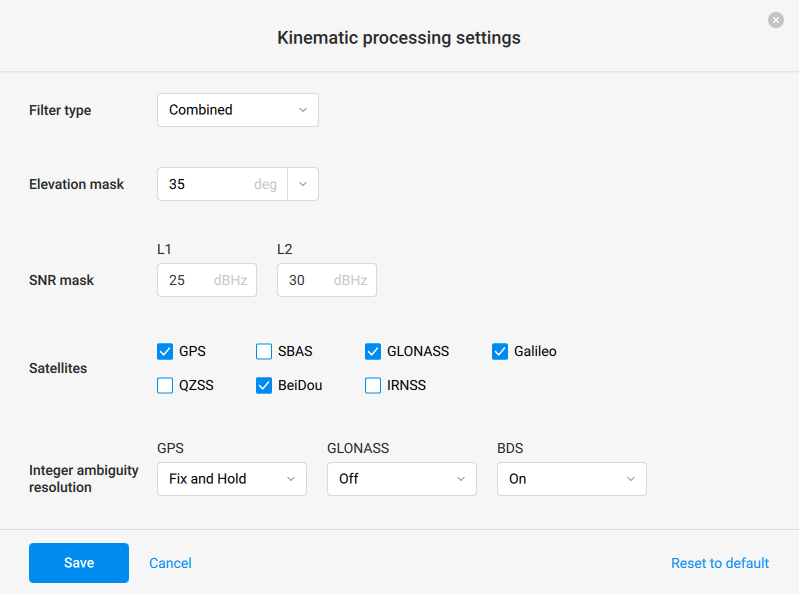
I’ve checked your data, both with the CORS and the Reach base. As Christian mentioned, the Reach base indeed provides an “easier” FIX, but I could obtain 100% FIX also with the CORS base using the following post-processing settings:
Regarding Static processing, I’d like to share our guide. It describes step-by-step how to use the logs to obtain the accurate position of your Reach base. After you have the coordinates, you can add them for the Drone data processing under the base log.