Hi all! Could someone point me to a workflow on collecting GCP’s with the PPK method and extracting the points with RTKLIB? I am sure it has been covered before, but I haven’t exactly been able to find it. I of course would use RTK if possible, but very rarely is that reliable across whole projects with the RS+ receivers. I normally use another manufacturer’s gear and have CAD/site control, but we have several situations where there is nothing and I would like to learn how to do something like this…
Setup base on an unknown point, but I will set a monument to return to
Log the base while I occupy each GCP
Process in RTKLIB
Would it be best to let the rover log the whole time or would it be feasible to turn logging on/off for each point? Just my narrow thinking that it might be easier to extract the point coordinate? I have PPK on the drone, but I would trust the results even more if I had GCP’s as well. Especially if I get benchmarks later and can adjust my previous flight(s) to them.
Setup your base on a point of your liking. Don’t have to explain that to you
Start logging on both base and rover
Setup a survey in Reachview
For each GCP position, use the survey tool in Reachview. This gives you a start time and stop time, which you then can use in RTKplot afterwards
Process as usual. One tip is to have 15-20 minutes obs time on the first and the last GCP. That will allow you to use the “Static start” method option in RTK view. It usually gives a more resilient fix ( can also be used for drone ppk).
when you then have the pos-file, “simply” go to Edit -> Timespan and input your start/stop times from the survey CSV file.
there are automated solutions for this, and I would recommend to use them, as the process of start/stop input is quite tedious !
Much appreciated! I will try that on the next bid flight. With running PPK on the drone I rarely run more than 5-6 GCP’s anymore so it shouldn’t be too bad. I’m mainly just looking to verify/enhance the relative site accuracy to ensure what I am giving estimating is trustworthy. I can trust about 7cm on the PPK drone alone, but would like to be able to “guarantee” them 4-5cm if possible. Like I said before, especially if I can get a site benchmark later to do a single point calibration to.
Correct your .pos as usual. Then use @jurijs.jeshkins piece of software in conjunction with your Reachview survey CSV. Done!
In RTKPost you will have to manually trim time interval to match points as @wizprod suggests . Reachview CSV is in UTC which is 18 leapseconds offset from GPST as default in RTKPost. (The software above calculates this for you). Not bad for 5 points but there is a better use of your time…
I let rover log whole time, just be cognitive of where it is (i.e. don’t throw receiver inside cab of truck then jump out to collect GCP for 5 seconds…)
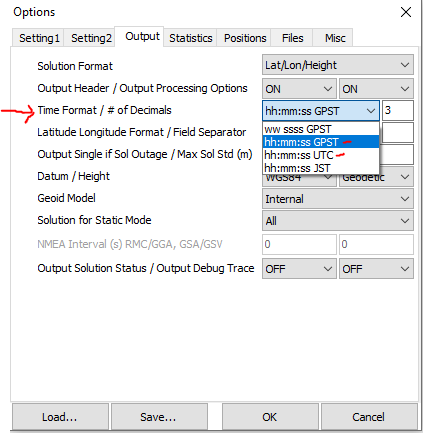
It depends on your output preference in RtKPost. If you output as GPST one would have to apply the correction. If output to UTC from RTKPost hen no correction needed. Reachview survey is in UTC.
HELLO Yes, rechview in its csv format the time is in UTC, so I must add 18 seconds to the beginning and end of each PPK point. In rtkpost I must indicate GPST or UTC to be able to do the conversion with the point extractor? I do not get it
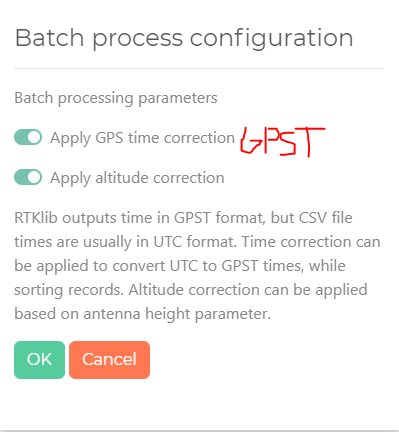
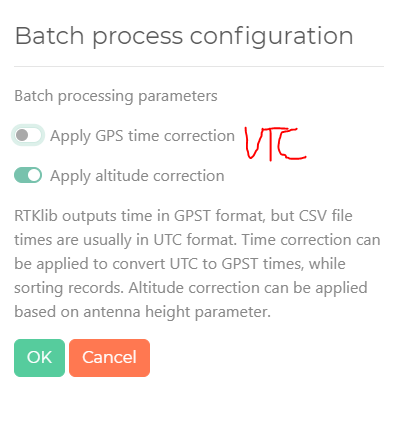
@agrimgalina, The PPK extractor software will handle it all. You can output to either format from RTKPost. If GPST you need to tick apply correction in the extractor. If in UTC no correction is needed and do not tick.
You need not to bust out the calculator on your end at all. Let extractor do the work. I think that’s where the confusion was, if not let me know!
I have the calculator next to me!
I’ll keep trying, I’m going to modify the GPST time in rtkpost but I see that the POS file is in GPST.
I do not know what the reason will be
I did not understand ! in the time format in rtkpost do I put UTC or GPST? if I leave UTC I do the correction with electron and if I put it in GPST I do not do the correction?
Luis, it does not matter in RTKPost you can use either or. What you choose here affects whether you apply correction in Electron or not. For this purpose leave as GPST in RTKPost. In the PPK extractor check apply time correction.
Other way around! If UTC output from RTKPost no correction is needed. If GPST output from RTKPost then a correction is needed,
Thank you, guys, for checking out my software. Yes, @RTK_Hunter is correct. If you apply these corrections in RTKPost, you don’t need to do it in PPK processor. Otherwise, you should make them in my software.
I have some free time now and I will spend a part of it on improving the software.