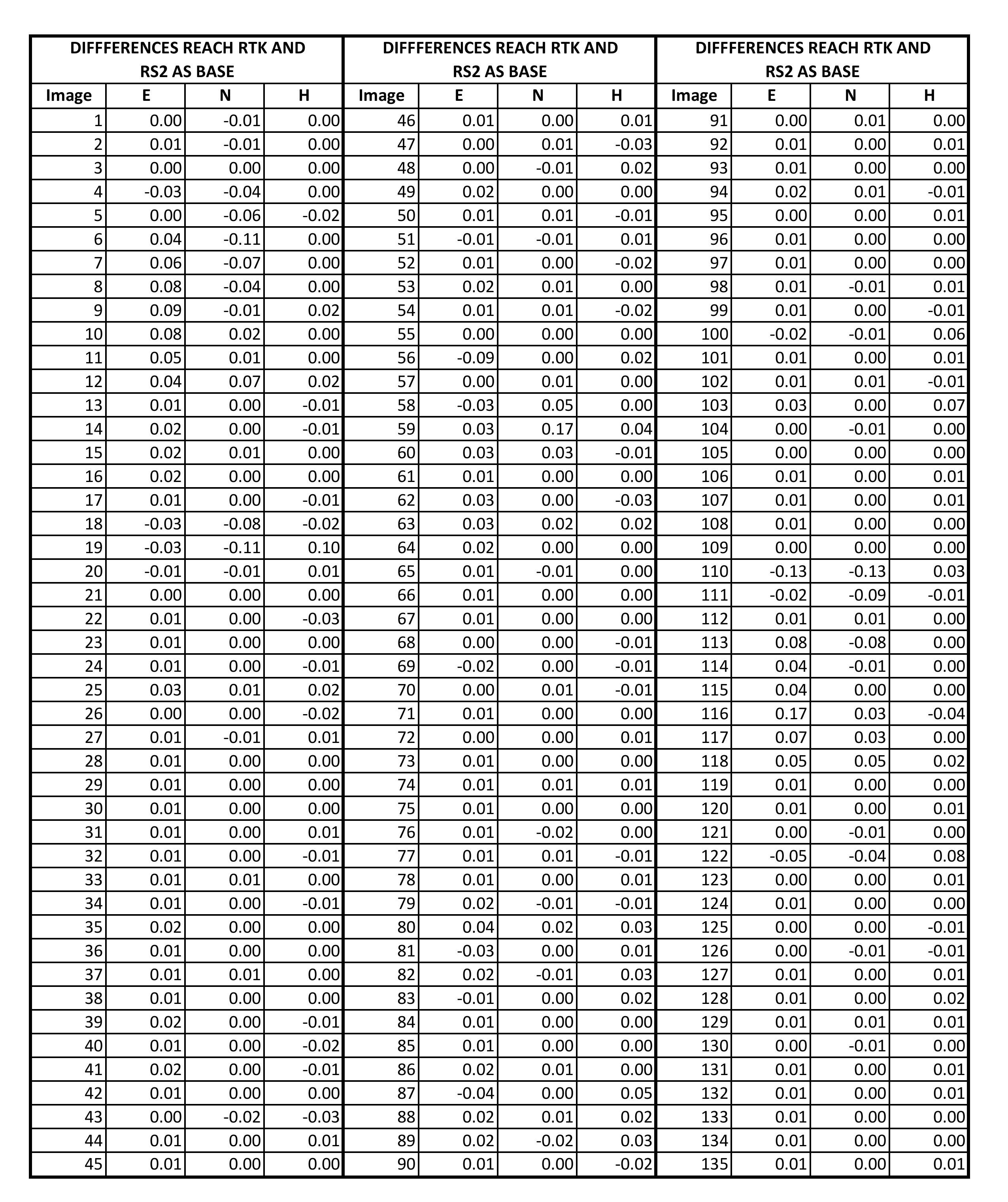
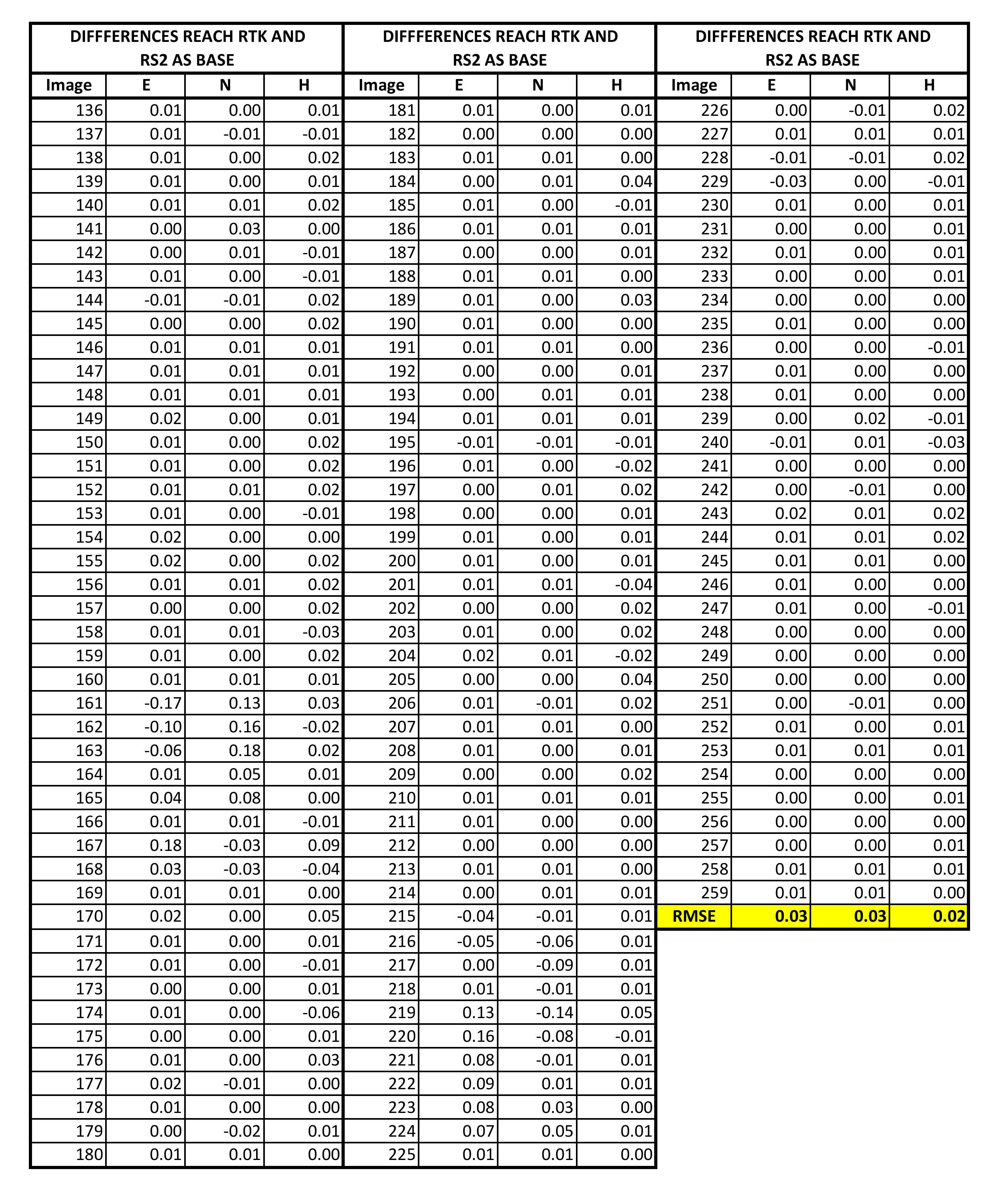
Note: the lines were very close for the type of plane and the height, so the turns were larger, but the images will not be processed. The purpose of the test was to compare the results from both bases.
Which seem very good results. It would have been interesting if some of the events from the Reach RTK base were Float to compare with the RS2, but all were Fixed. Anyway the max distance between the UAV and the Base was no more than 1Km, so I think the results were as expected.
I´ll go for a M2 when it became available to have L1/L2 Base-Rover.
Our company has been using the RS+ combined with the M+ on our drones and have had great results as well. This is easy because you can put the base in a nice clear position and the drone is in the air, but the trouble has been trying to survey with our other RS+ and maintaining an RTK connection. I hope to overcome this with the RS2 kit, but also when we receive the M2 to be able to test RTK instead of just running PPK. I am highly skeptical on trusting RTK alone, but results will tell.
If one of your receivers (base/rover/drone) is L1-only then that is all you will get.
I’m planning to get another RS2 for surveying too, for now I am testing with an RS2 and Ntrip.
Regarding the UAV, if that is what you mean when you talk about M2, in my opinion PPK is better, since in the end what matters is the coordinates of the images, and it is the same to obtain them while flying than through PPK once in the office. And you are adding more components to the system with RTK. But would love to see the results if you do the tests!
The RTK on the plane I think it could be used maybe for Autolandings too.
I agree. I have run enough GNSS over the past 20 years to know that even though a receiver reports RTK that it is not always a stable fix and in some areas even in clear conditions satellites can get a little screwy and there is allot of hopping between fixed and float. This is with high dollar survey grade equipment which the RS2 is as close to as Emlid has ever been on RTK so I will give it a try. At least with Emlid I can run RTK and logging for verification, whereas with other solutions including the Phantom 4 RTK you cannot. You can get logs out of the P4RTK, but it is not easy unless you have a software designed for that format of data.