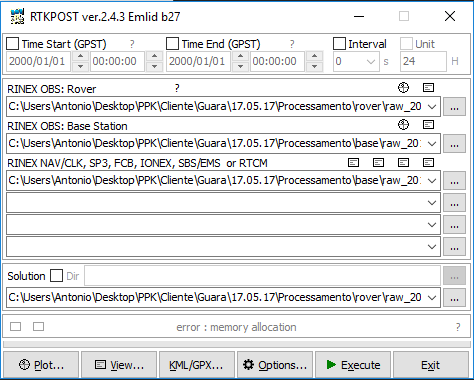
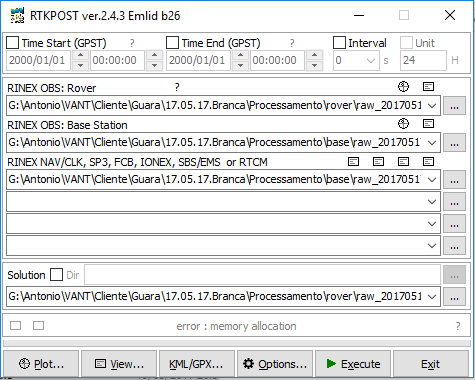
I’m processing a flight but I can not move because when I put it to run it appears Error: memory allocation, please some help!
I’m processing a flight but I can not move because when I put it to run it appears Error: memory allocation, please some help!
Is it possible you could share your log file? or tell us more about it, condig etc
No problem open it with RTK 2.4.3 b26 . Could you be having memory issue on your computer? it was somewhat heavy file
If not try, different rtk version.
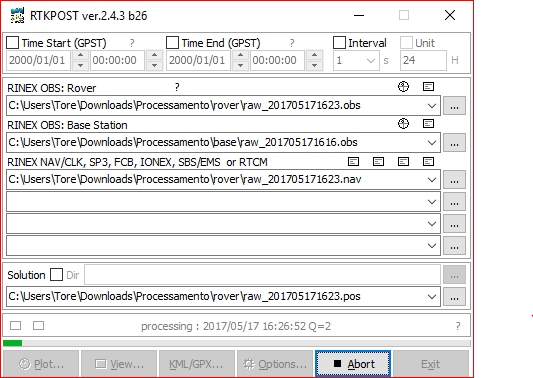
I used these files
Sometimes I get the insufficient memory error too. I find that I can only process about 90 minutes of 5Hz log file at a time. So there are two things you can do:
Thanks I try the old version, Unsuccessfully!
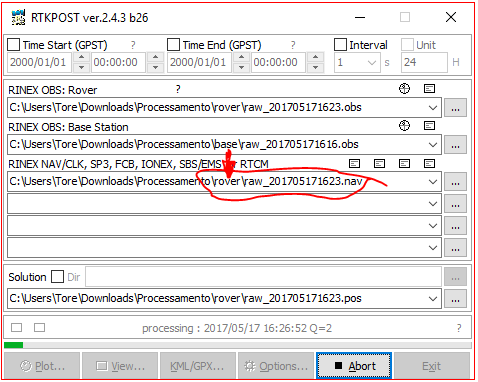
@TB_RTK In ppk post processing you should use base file instead of rover file or I’m wrong.
@bide I am using 14hz and my flights have in average 70 to 120 min, i ll try your technique to exclude part of the flight! What other suggestion do you have? thanks for answering. My computer is an 8 gb and 1 tb. What memory is wrong?
I don’t know how the memory management of RTKPOST works, but it is possible that the app limits its own memory, and then it would have nothing to do with the size of your computer RAM.
You could try the command line version of RTKPOST, which is rnx2rtkp.exe. I noticed with the command line under Linux that I could post process much larger RINEX files. It is probably the same under Windows.
Still works with “nav base”. @antonio.arns1 Are you using any other file then the ones shown in my rtkpost picture?
Edit: 8gb memory here too.
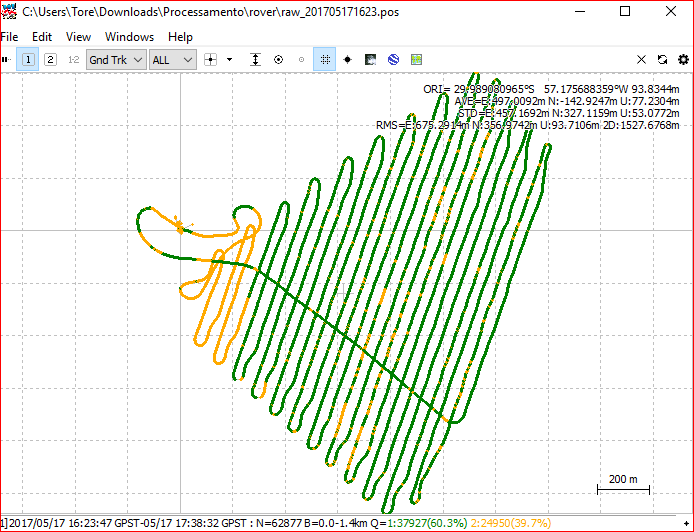
You also wanna check rover for noice, it sems there are some interference there
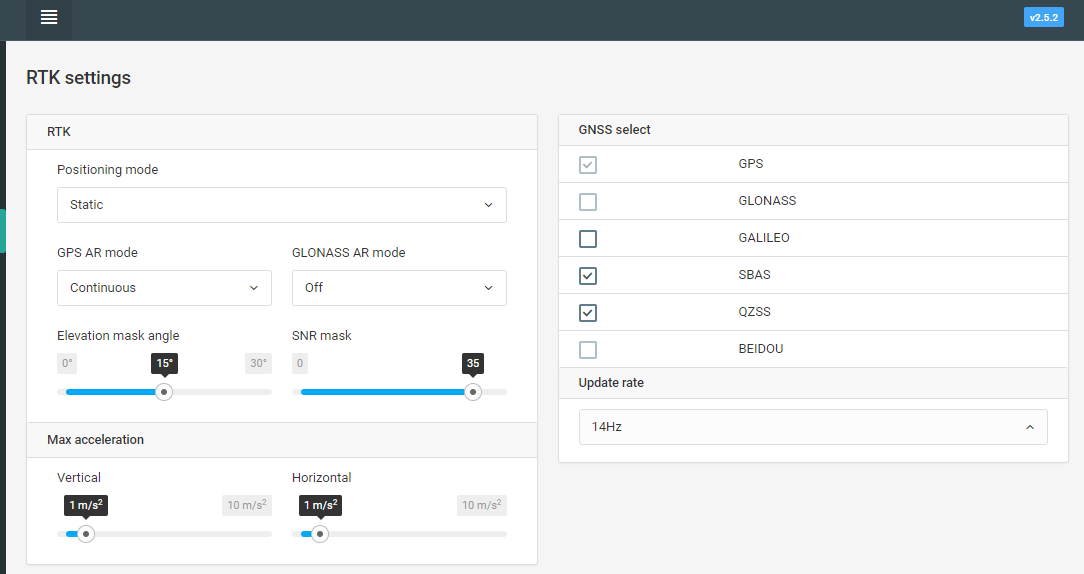
Thanks, here is my tuning! My problem started when I disabled the Glonnas 5 hz and I switched to 14 hz GPS, can this increase the noise? So I should go back to the GPS 10hz but Glonnas disable?
I dont think 14hz creates noice, it could choke Age Of differential though.
also use kinematic for moving rover. Fix&hold might give you better result.
I also didnt use sbas or qzss, not sure you gain anything with that, but it could hurt to try.
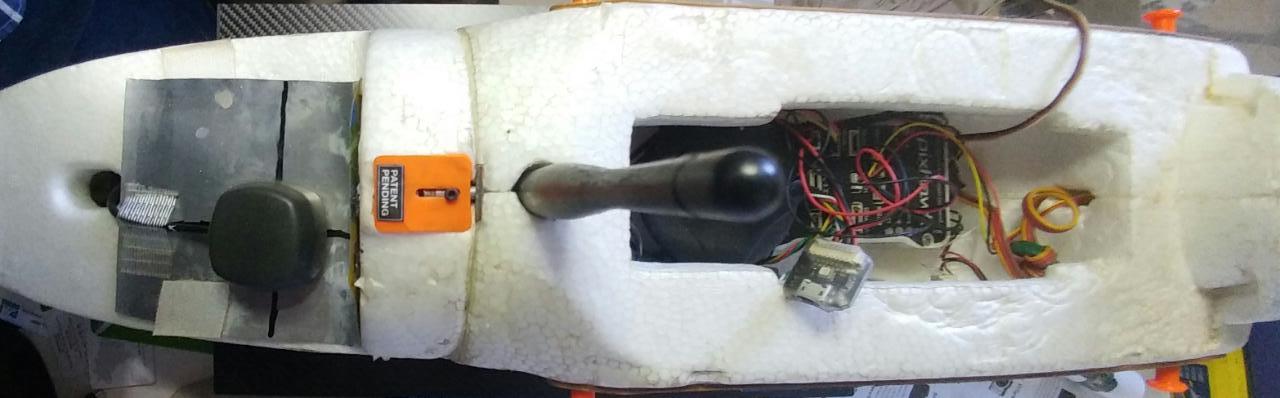
Do you have a image of rover setup? Is it a drone?
@TB_RTK Thanks again! So I keep the same configuration in Base? I use static, continuos and Glonass Ar mode off 14hz and disable the sbas qzss! Now with your suggestion i ll use in rover this config, 14hz and disable the sbas qzss , kinematic and Fix&hold. This will perform well for PPK? Please give me some pictures of your PPK config.
Allright, cool airplane.
There are couple things you need to fix.
Thanks a lot to dedicate your time to solve my problem, I ll change my setup and tuning my setup, and flight again, now I think that my problem is finished!