So I’ve just acuired the Phantom 4 RTK and have flown with it with good results using PPK and RINEX-data from a service provider in my country.
I now want to use my Topcon Hiper HR basestation. What I’ve understood is that it should log data for +1 hour for good numbers.
How does my workflow look?
In my handdevice I can only start and stop the raw-loggin.
Should I calculate the BASE first with the obs from the BASE and Service provider BASE+NAV?
Then enter the .pos file I get from the result in options>Station Position File?-for calculating the rover (drone).
I somehow need a fixpoint, where can I enter that i RTKPOST? What is the difference of the RINEX Header Postion and the other options? I feel that section is a bit undocumented. Is it there where I enter the known fix point? (the BASE need a known point, where do I enter that?)
Is the option>Base Station Lat/Long/Height (deg/m) the fixpoint? base underside or Base center?
Should I use the Nav file from the base in RTKPOST? Or should I download it from my service provider, to get the best result?
I added Glonass satellites in the calc and I could finally get the one with the service provider working.
Update:
So I did some earlier jobb with the same settings and there were some really good quality once I interpolated the drone shots.
But I’m having serious problem on this jobb tho, I’ve spend the entire day with nothing but faliures.
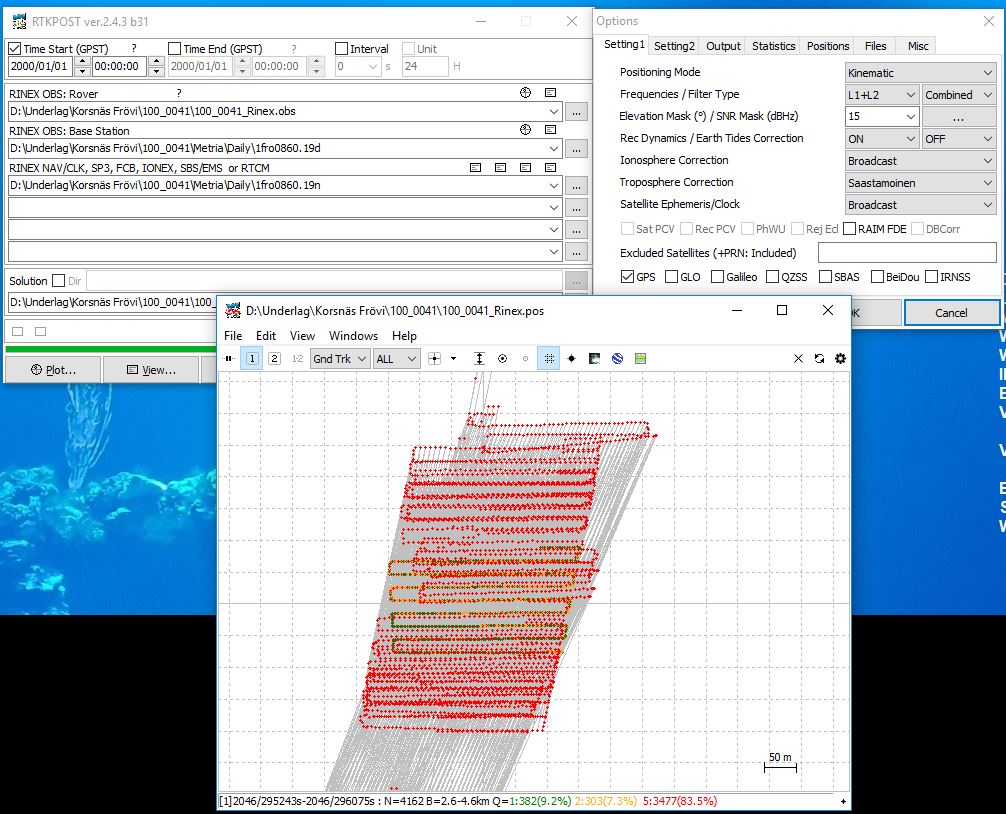
So I start off with adding the obs,Service base, nav n and g.
Process them and the report says the quality is perfekt or near perfect.
Then I process and interpolate the timesshots with the lat/long coordinates. To get the exakt time/place of the drone when shot.
Then I import the images and the csv files with my new coordinates to Agisoft Metashape and align. The internal quality says somewhere betwen 2-5 meters wrong! and my controll points are just as bad.
I sadly cannot figure out where the fault is. The flight path in RTKpost looks great and straight.
My post calculating excel-file (interpolate the timed shots) is quite simple but very hard to navigate down problem in. I’ve gone back to older jobb’s just to doublecheck I’m not doing anything wrong.
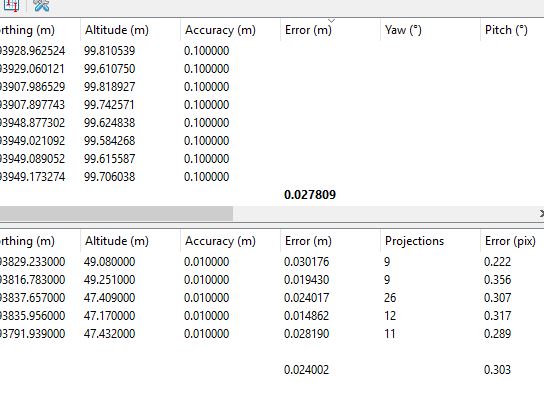
Could someone please look into the data seen above and look at the numbers if there is anything wrong. I’ve uploaded a new config file as well.
I’m VERY near the closest base stations service tower.
Late yesterday night I managed to get the drone + service provider correction working. Apparently it was Agisoft Metashape that is stupid with me. I simply had to add a few ground points, make a optimize camera, add a few more ground points and optimize camera once more and i got 28mm internal fault (drone) and 24mm fault with my gps…Sweeeet. I still don’t understand why I need the control points just to get good numbers =/. Good thing I brought my control points.
With my own base, i dropped one target underneath the base station that I established my station above. (1.2m over), next the base station is independent from my normal handheld rover, because I simply used RTK for it.
Although the literature states 2-3cm “relative” accuracy without ground control points (GCPs) I have not come across and single person that is getting better than 4-5cm consistently.
Why don’t you skip PPK and use the actual RTK? Either way, GCPs (in my opinion) will never go away for two simple reasons. In traditional benchmarking a process called localization is used to tie large networks of points together so that those points and all points inside of them are as relative as possible and the error is distributed out to 0.03’ over 1000ft in most cases. We don’t even accept data with errors above 2.5cm! GCPs are the localization for a drone survey. Second and most importantly, GCPs serve as a translator from a GNSS based coordinate system to a local physically derived coordinate system. This is doubly important when working in the U.S. and dealing with property and projects controlled by a State Plane coordinate system.
I for one, as a surveyor, am tired of hearing the term survey-grade without GCPs associated with the P4RTK. It is an overpriced, over-promising, poorly documented and falsely marketed device that is causing allot of problems not only in the drone mapping community, but in the construction industry as well. I feel very sorry for people that think they are going to walk into this scenario with no previous surveying, GPS or construction experience, pay $10k and start producing “survey-grade” data that will actually be useful to someone.
Rant aside I guess I should be grateful though being that I know what my competition is doing. Keep at it and study some survey/control theory and you will get there!
We do not own one, but I had the chance to fly a couple of missions on demo from our local Komatsu dealer. I also have a peer that works for one of our competitors and after analyzing the data between the three flights there was an average of 10 images that were in a float condition. This basically means that it was not rtk when it took those images. That’s proof enough for me that I trust my $1200 PPK set up over a $10,000 purchase. One thing to understand is that our sites are on average 30 acres and above with the majority of those being in the 100 acre range. One thing that is consistent across all GPS surveying equipment is that you will undoubtedly have this occasionally happen once you get a thousand feet or more from the base. In the three tests that I saw it happened every time. While it wouldn’t be very noticeable just from looking at the map and point cloud, when you look at the PPK data afterwards and where the images were taken it becomes pretty apparent that I can’t trust the accuracy across the entire site.
Without GCPs, you have no way of stating the accuracy of the data that is being delivered. In our projects it is typical that we lay out 50 or more Control Points, and have about 25 Check Points that are scattered over the area, and tried to be laid out between control locations. We also have a good idea of where we think the data will screw up, and where it will be rock solid (when it comes to photogrametry). Without this, we would not trust our own data.
If anything fails on board the camera capture platform (weather that be drone, or aircraft) like a log glitch, or in correct timings, IMU failure, miss-fired camera, post processing doesn’t work etc, you can still use the ground control (and maybe swap some of the checks to control).
PPK/rTK onboard the camera platform only aids in providing it a better starting point for some of the steps of the overall photogrametry workflow. You can still get some pretty wildly inaccurate point clouds and final data sets when using the PPK/rTK and ground control.
What we have found is that on board the camera capture platform that uses PPK/rTK doesn’t mean I can get away with no ground control or checks, it means that I can have less ground control, and the same amount of checks.