Base and rover are stationary for a period. Then rover is flown. Then base is moves to different locations for GCP readings.
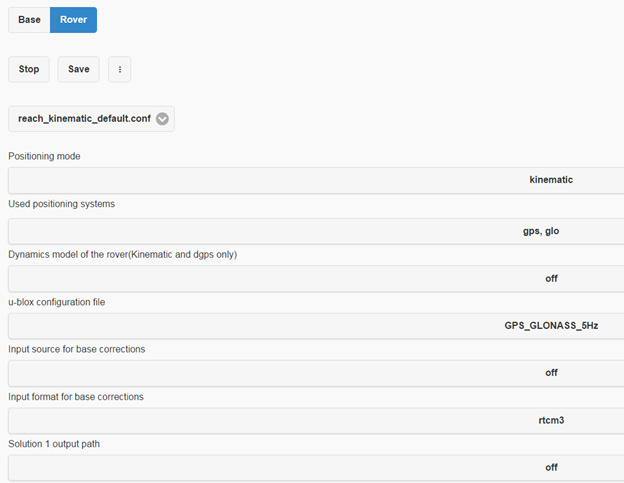
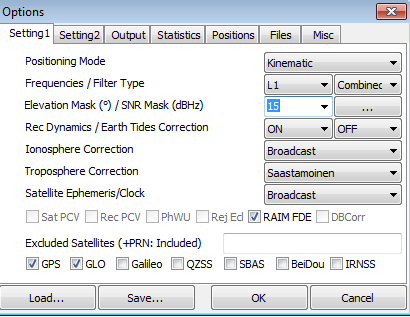
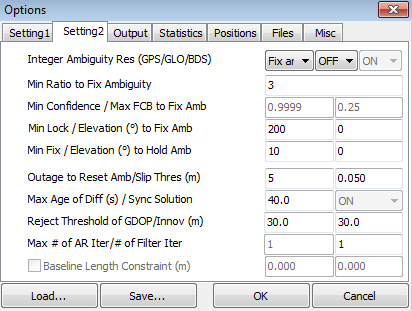
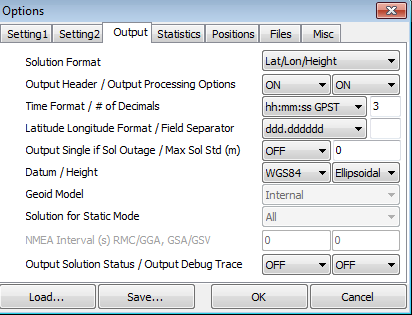
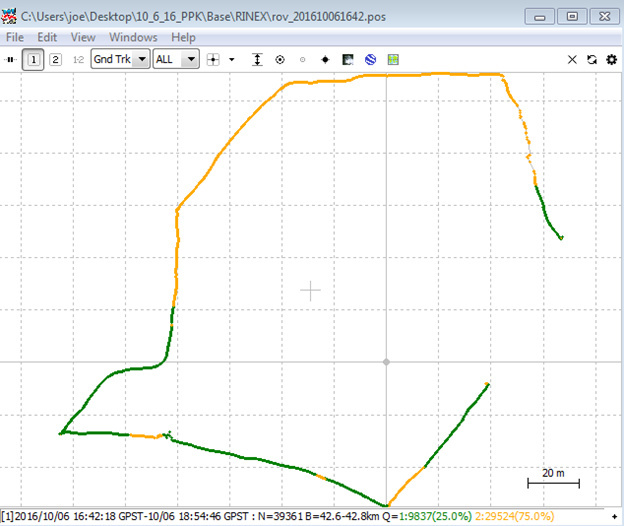
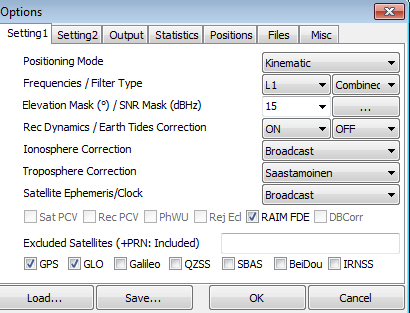
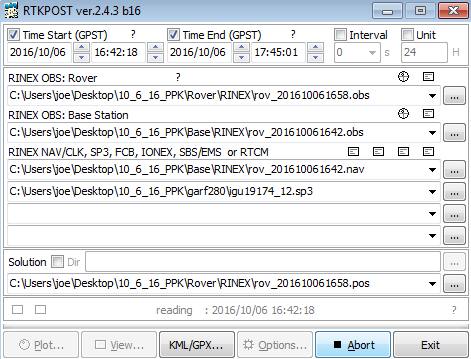
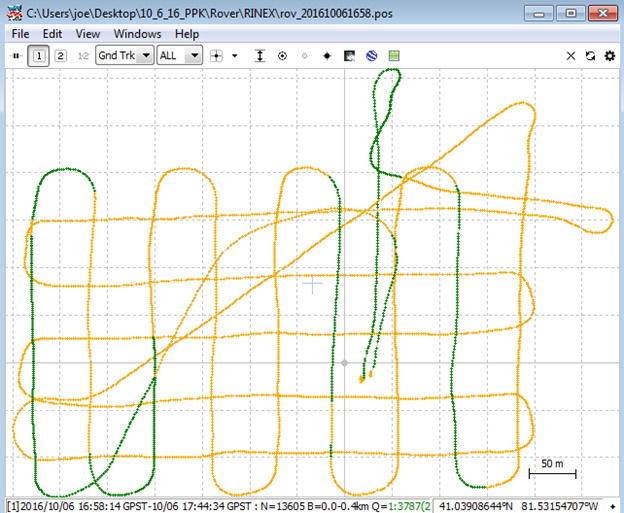
During processing, we first process the base in kinematic mode to determine when the base was moved.
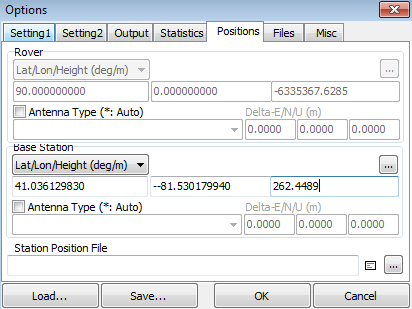
Pull start and end time at the base station as well as GCPs.
Start Time End Time
Base 16 42 18 17 45 01
GCP1 17 47 09 18 00 19
GCP2 18 03 32 18 17 17
GCP3 18 20 30 18 32 56
GCP4 18 38 40 18 53 22
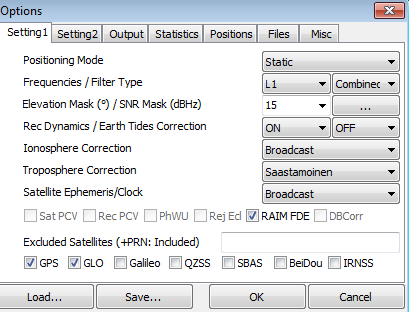
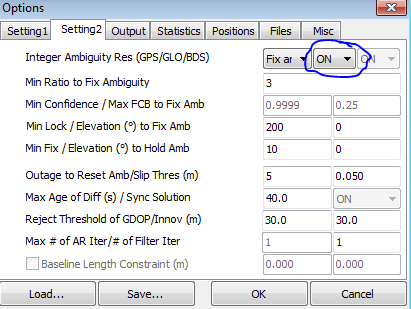
Change to Static
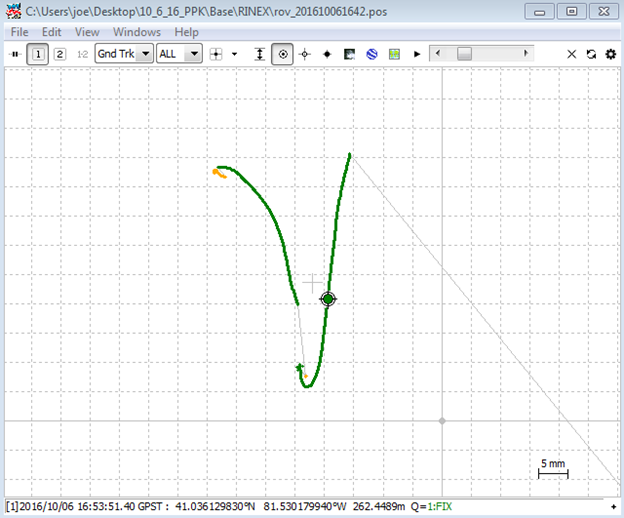
Process base using time start and end.
Use these GPS points to tag images.
When processing, Agisoft claims a 0.48 m total tag error.
When we look at the mosaic and insert a point equal to what we gave the base coordinate, we are about one meter away from where are base is on the ortho.
I have the QX1. From what I researched, it seems that if you are using the hot shoe, the shutter speed must be very slow. Having a slow shutter speed with our fixed-wing is not really an option. The images just come out blurry.
There is flash HSS in photography which does not mean High speed sync. I use it on my 6d and can shoot at 1/4000 with flash for personnal shots. Of course, I don’t use my 6d on my drone because it’s too heavy.
With Sony hybrid camera, if you put your camera in manual, you could use fast shutter speed and still get hot shoe signal (Watch here : Sony NEX-6 sync-speed test with Cactus v5 wireless trigger - YouTube ) which is important for geotaging. But as far as I know, your QX1 doesn’t have manual mode and no hotshoe option