ESCs take power direct from the battery (usually via red/black banana plugs) at higher power (full battery voltage/amperage) to spin the motors. Separately, they receive control signals via a 3 pin servo style connector, with two or three of the wires connected…
Additionally ESCs with integrated BECs send out 5v power as a convenience (down the servo cable red wire), e.g. for planes so you only have one power line through the motor ESC then to the flight controller. But on multi-rotors we then have too many. So disconnect and tape-up the power line from all but one of your ESCs.
If you have “opto” ESCs they ditch the BEC altogether, and if they are truly “opto” (not just missing a BEC) they also electronically isolate the two (high and low) power circuits better, which helps avoid sending interference back to the flight controller. But then you need 5v at least for the RC input, but maybe for Navio and any other servos you want.
So why bother with a separate Navio power source? Because you really need to know the battery voltage so you can land before it drops out of the sky. For this the normal way would be to use the Navio power connector with Pixhawk compatible module, as Emlid sell too, or a PDB like the one I suggested.
And why a PDB? Normally you would have to splice the battery wires out to each ESC/motor, which could get messy. The PDB with APM/Pixhawk voltage & amp sensor integrate gives you the best of both worlds, tidy-up your ESC supply and also give the necessary information to Navio/APM.
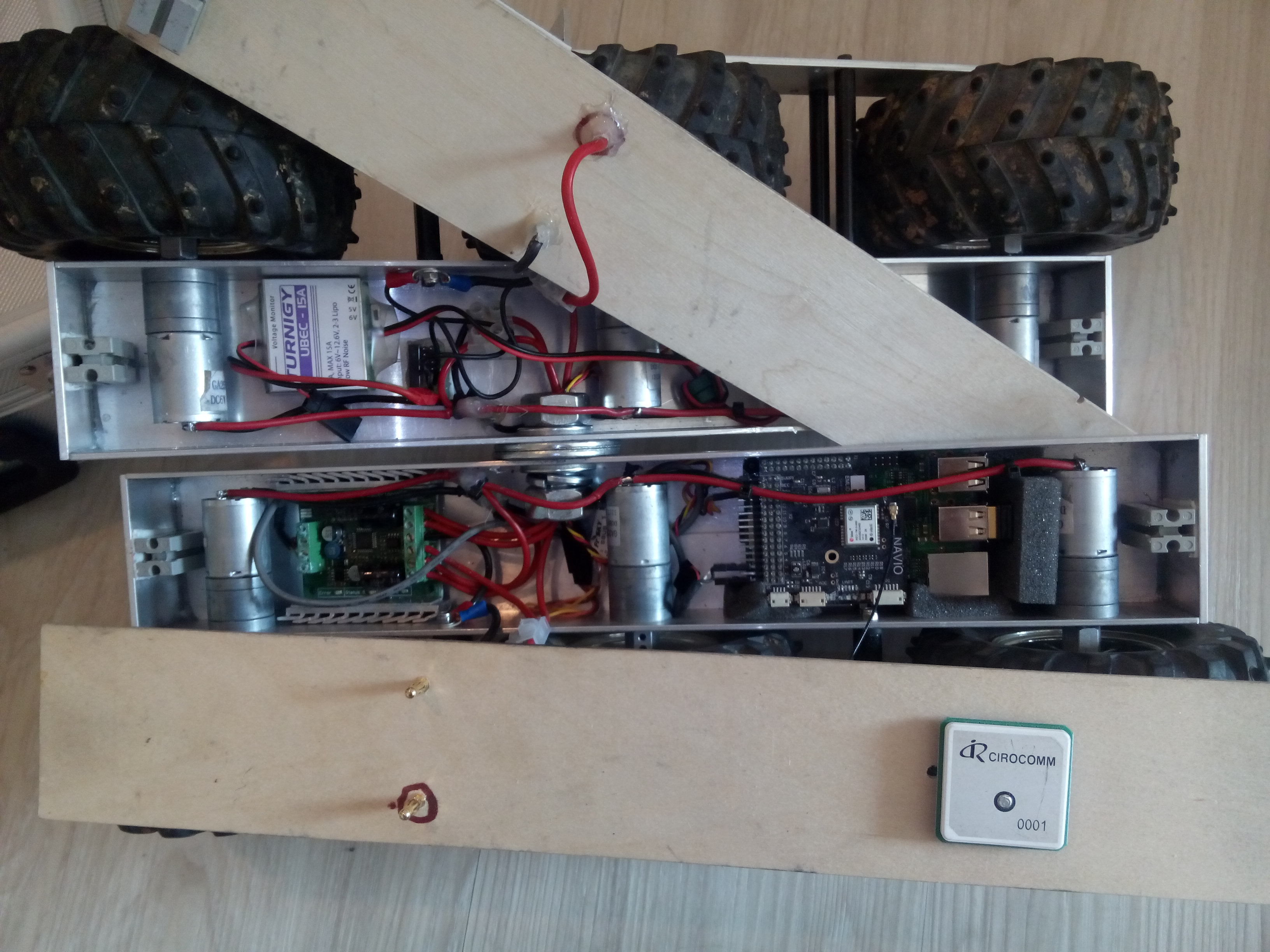
Furthermore, the one I linked to also provides two additional separate 12v and 5v power supplies. That’s perfect for me because I power my Mobius from the one (5v) and my OSD and Video transmitter (12v) from the other. The power is also clean (on that model) so it saves adding low pass filters to get rid of video interference.
I use that PDB all the time, it’s good for 10 cell batteries. But as I only need 4s next time I would get the new Hobby King “micro” PDB module they recently released.
The connections are documented here:
http://docs.emlid.com/Navio-APM/hardware-setup-navio-plus/
Only point of caution on the diagrams there, is it shows red wires from all the ESCs. Remember only one power input should be connected to the servo rail.
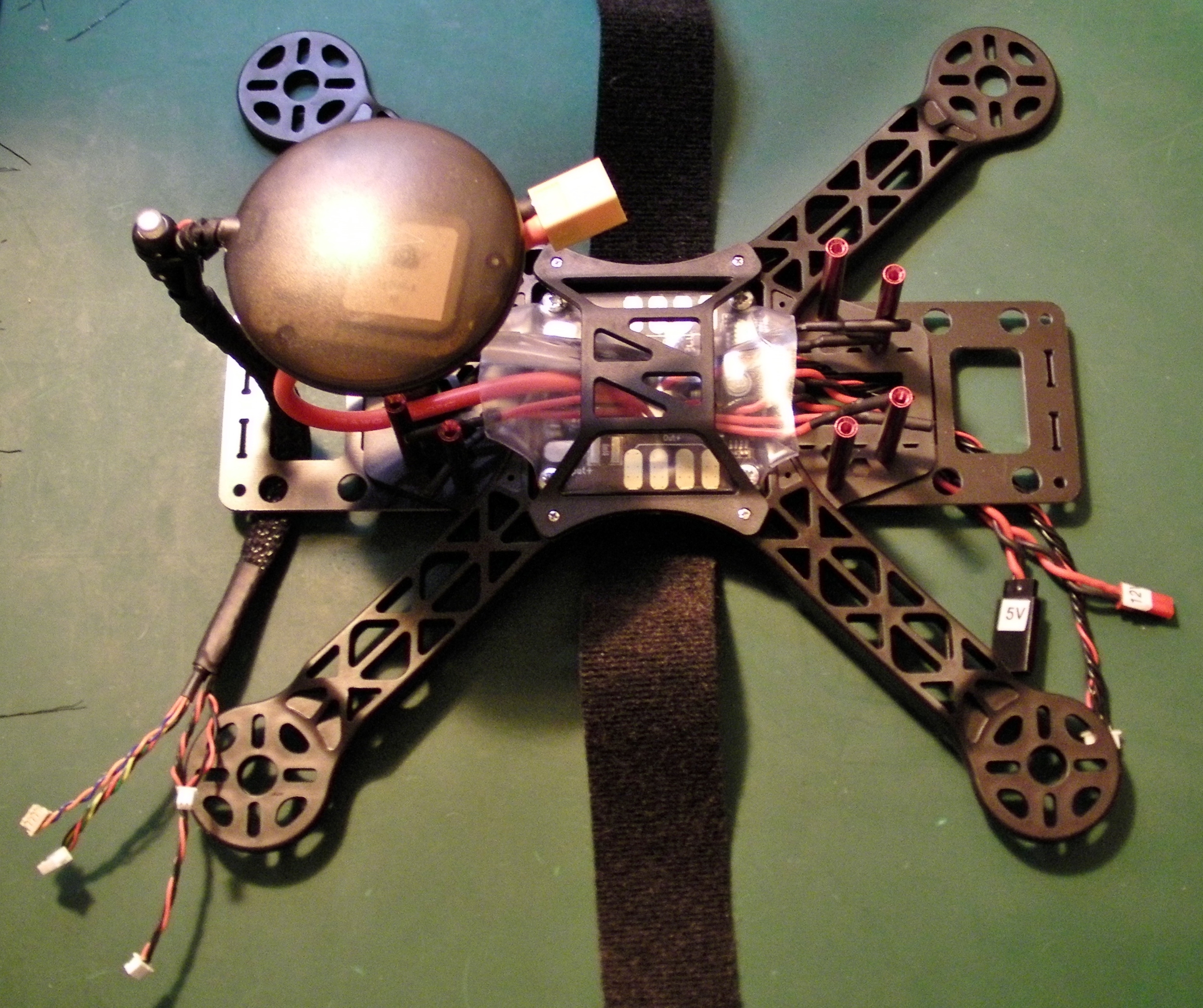
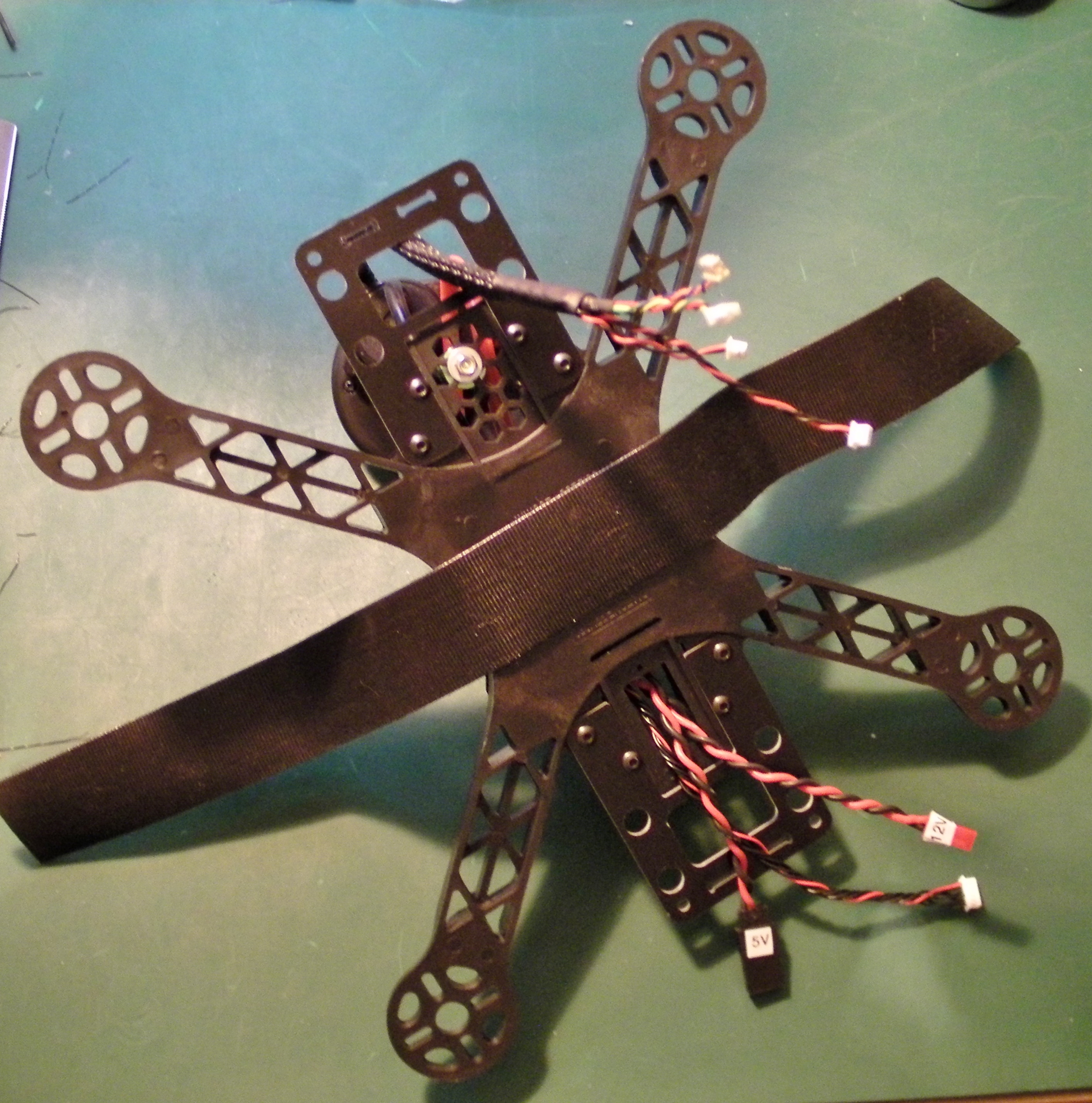
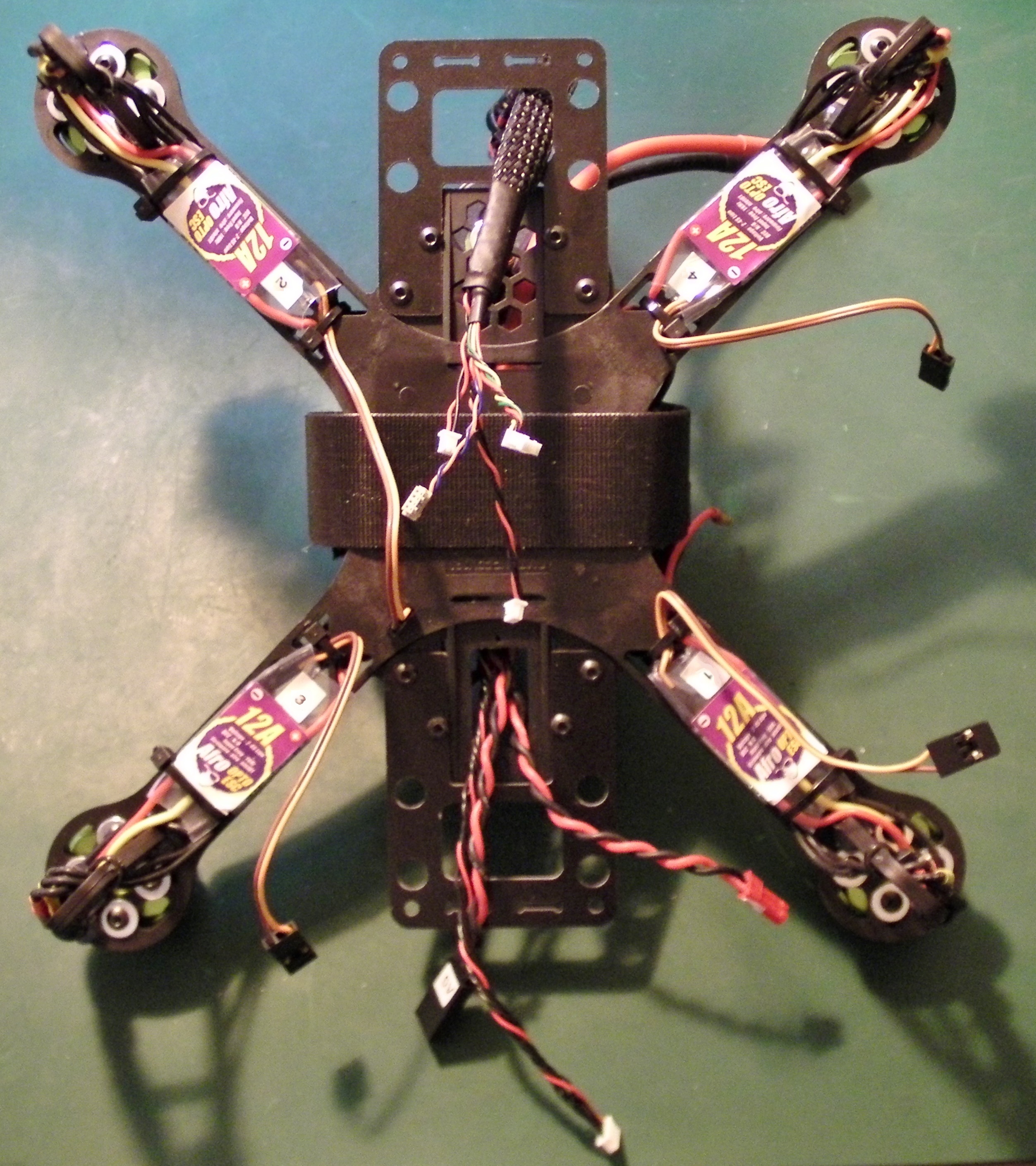
Here are some of my own pictures of the wiring:
p.s. As you may notice (from the different GPS and cable) that is from my Pixhawk build. The Navio version looks almost identical. But I haven’t documented that yet.