Firmware image and ReachView version.
2.4.3 b28 RTKLib
Detailed problem description. How does observed behavior differ from the expected one?
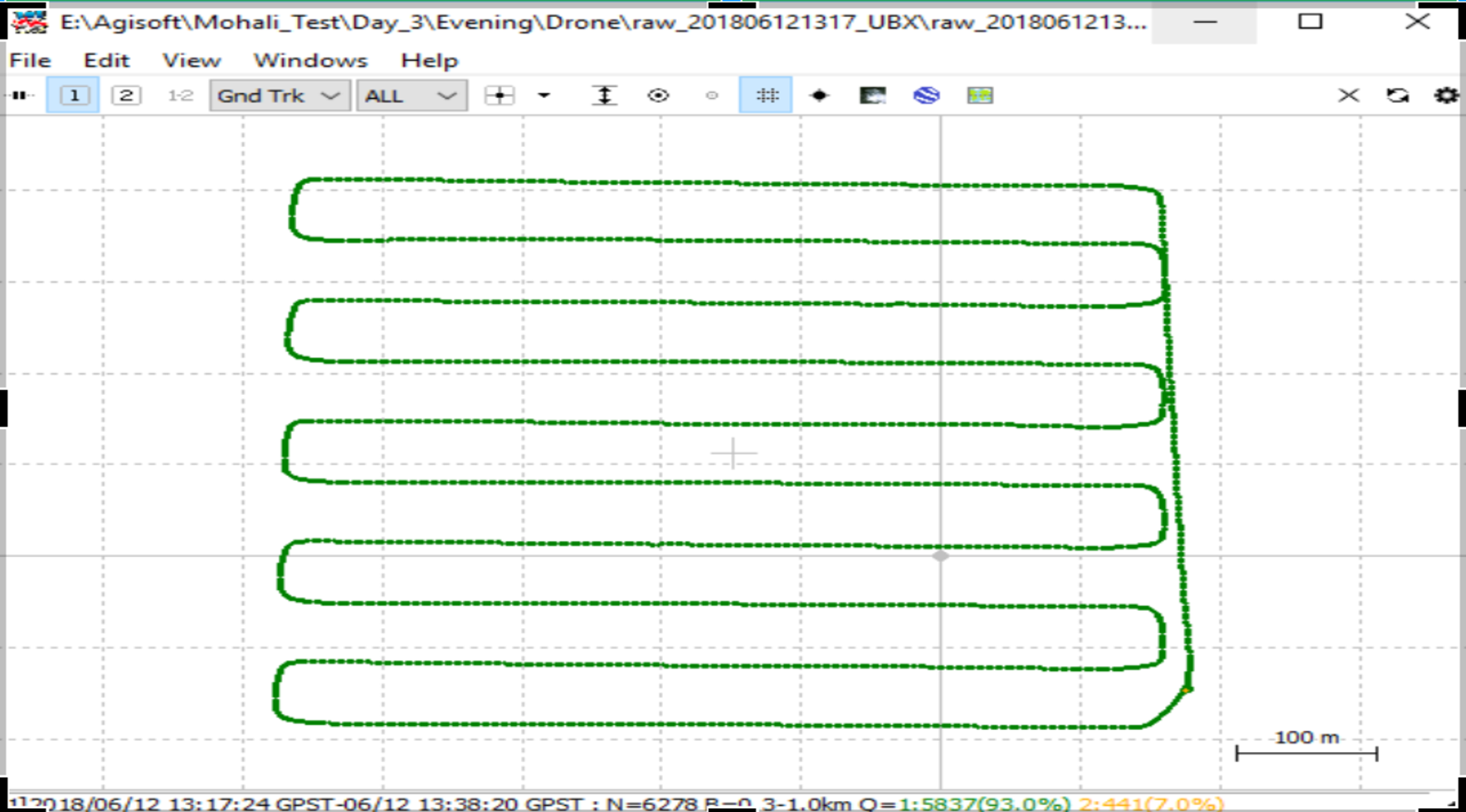
I am using Emlid reach Module mounted on UAV. I am taking test flight to test accuracy of emlid reach. I cannot get all points fix while processing in PPK mode. My baseline is <1 Km. I thought with such small baseline I would get all the points as fixed but getting only about 70% fix. Can anyone tell me how to get good percentage of fix? Are there any guidelines to be followed to get good results? I have
Your step by step actions.
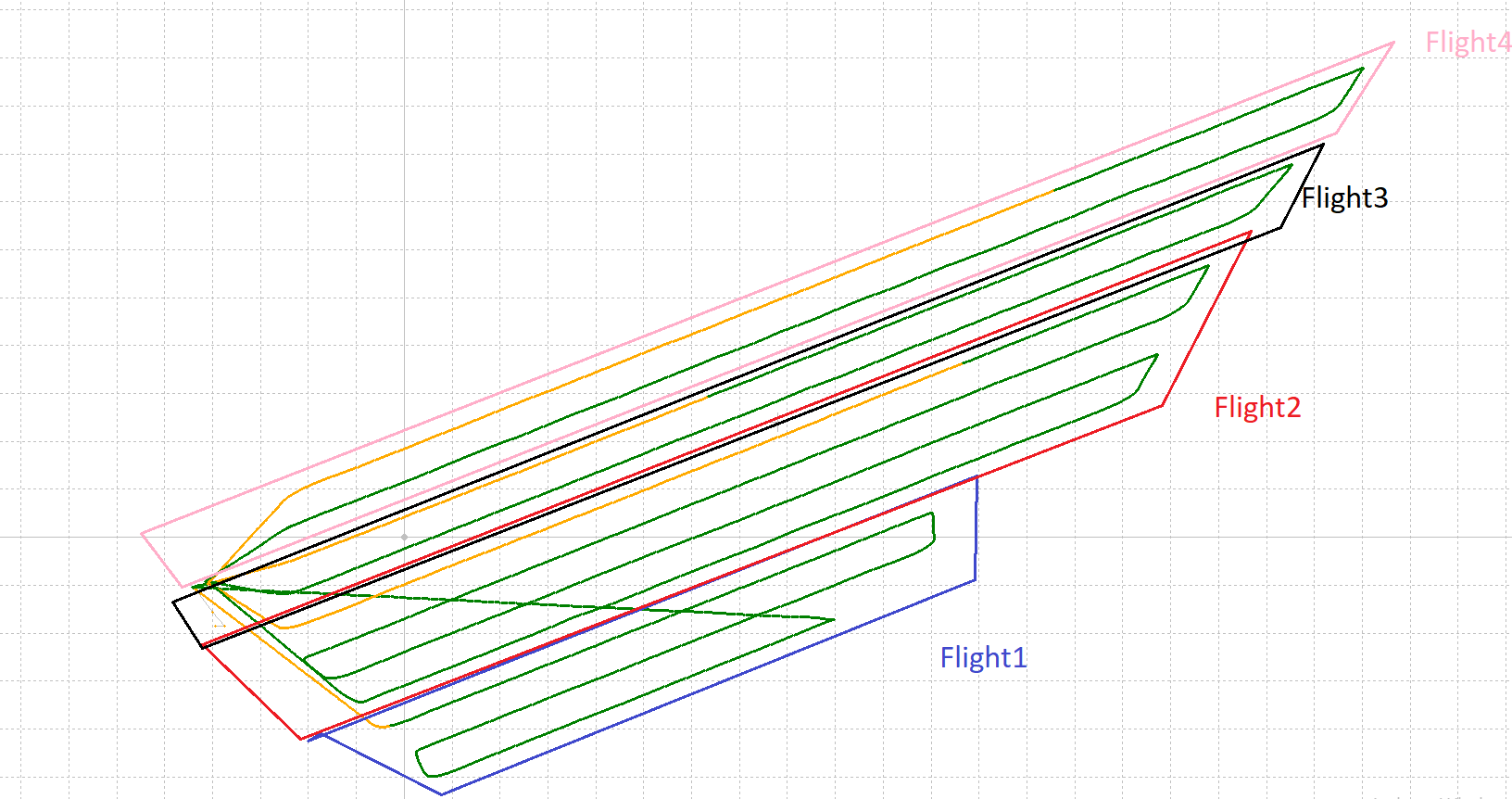
I have taken 4 Flights. I didnt turn off the emlid reach of drone to avoid doing cold start everytime. I observed that at start of every flight, I am getting float results and after sometime, It get fix. Each float line represent starting path of flight in the figure given below
I have followed post processing tutorial from emlid website. And following were my settings.
While you wait for Dmitiry to reply, you might try changing Filter type from Forward to Combined, and you will probably see some more fixes in your solution file. Change it on this page:
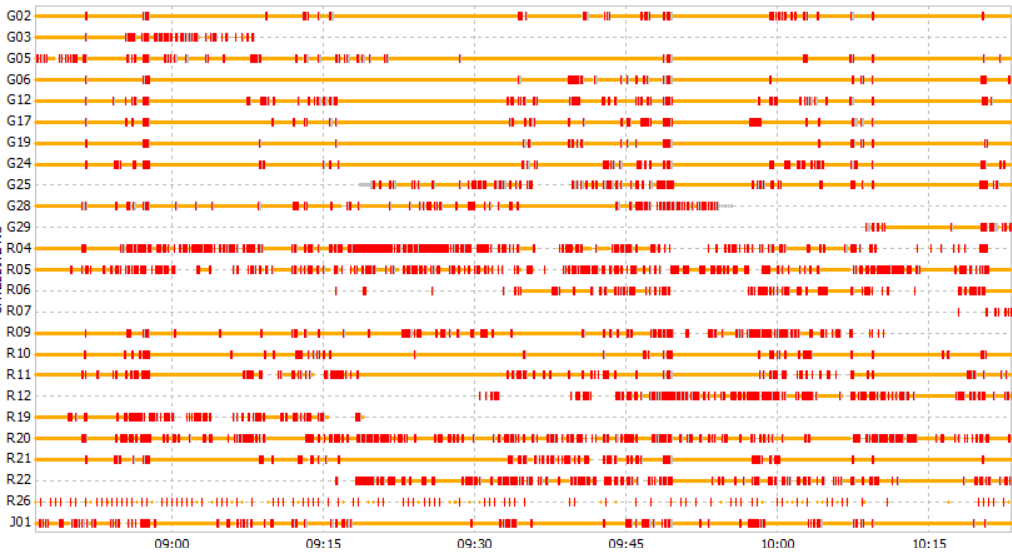
On the graph, you can see a lot of red markers, they stand for cycle slips. In order to get rid of this issue, you need to follow the instructions from our docs, please take a look at this entry: https://docs.emlid.com/reach/antenna-placement/
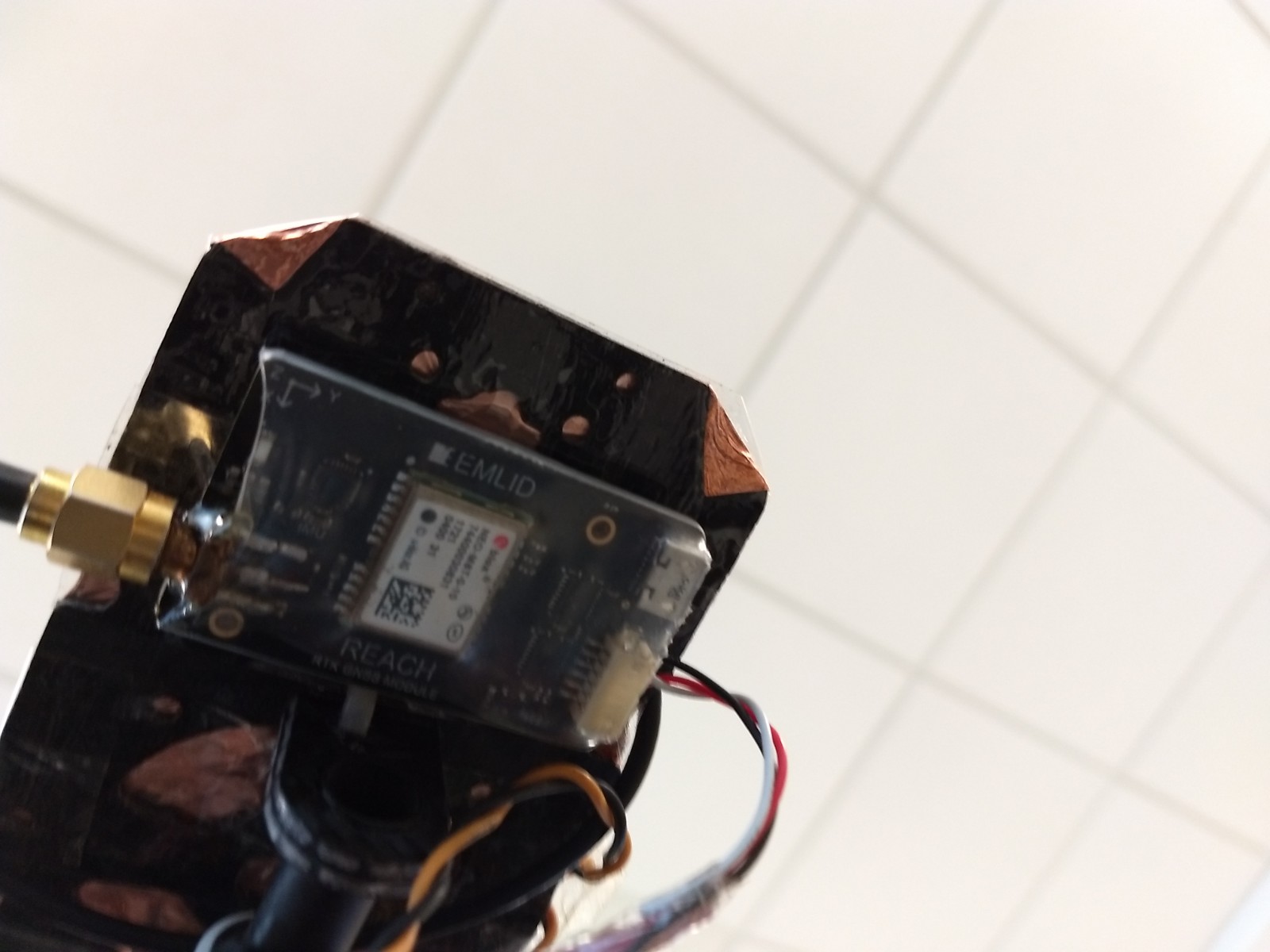
I warped copper foil around reach module to reduce interference. I am getting very good results. It was indeed because of interference/noise. Thanks for the help