I have been trying to process RS2 & M2 data with Emlid’s RTKLIB and recommended settings, but I am not confident in the solution for several reasons.
First, the time to achieve a fix is nearly minutes in forward processing, whereas I thought dual-frequency time to fix was significantly lower than that. On-Board RTK easily gives me a lock in under a minute; I though post-processing was supposed to be equivalent or better.
Second, most of the AR Ratios are lower than what I remember achieving in the past.
Finally, when comparing the “AT” photogrammetric solution to the timestamps, I see 4+cm of RSME, even though my base station is <1km from the site. This leads me to believe there is an error or some settings that need to change from the default recommendations.
The AR is not so much of an interest now with dual band reciever.
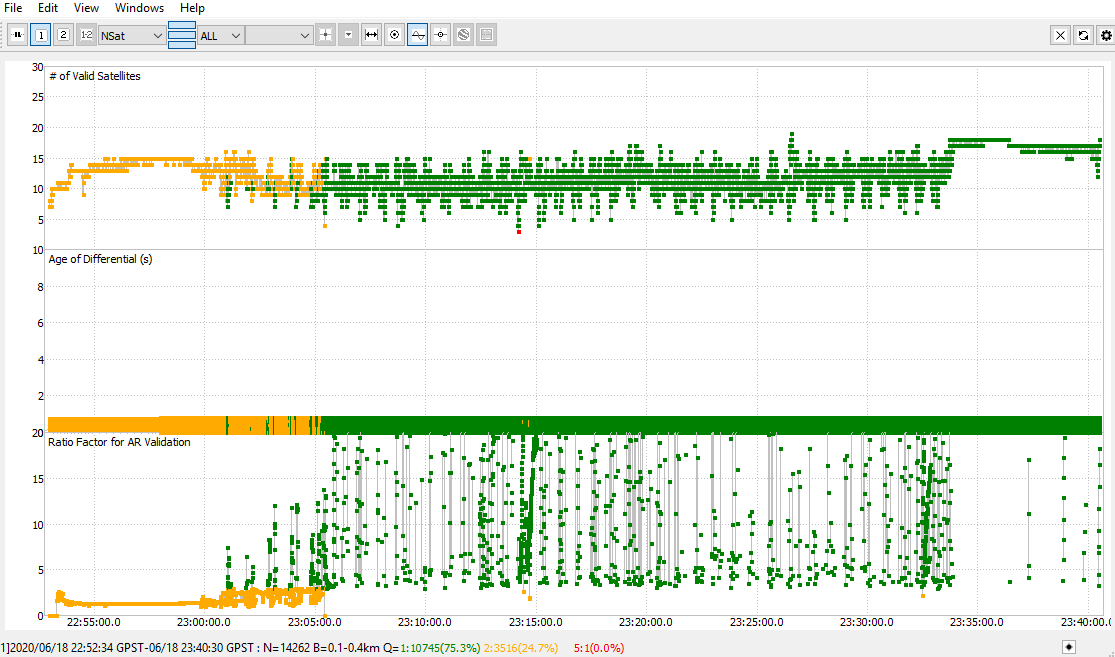
Here is my result of the process. Default values might not always give you the best result.
Play around with different setting and get familiar with what they do, this should help determind what setting you should use.
(solution file, opens directly in RTKplot) Aircraft.zip (297.2 KB)
I have been familiar with RTKLib for the last 2 years, and I’ve been over the documentation multiple times; to be honest, I don’t have the time to experiment with all of the settings. Changing things experimentally takes 5 minutes per run, and it would take weeks to blindly try changing settings… and that doesn’t even guarantee better results. I don’t see how the reports or plots give you a better idea of how to “tune” the settings. The defaults are provided from the Emlid site, and I don’t see how they work very well.
The first 380 photo events in the solution you provided were identified as Q=2 (float) and I thought that these multi-band receivers would do a much better job than that.
OK then.
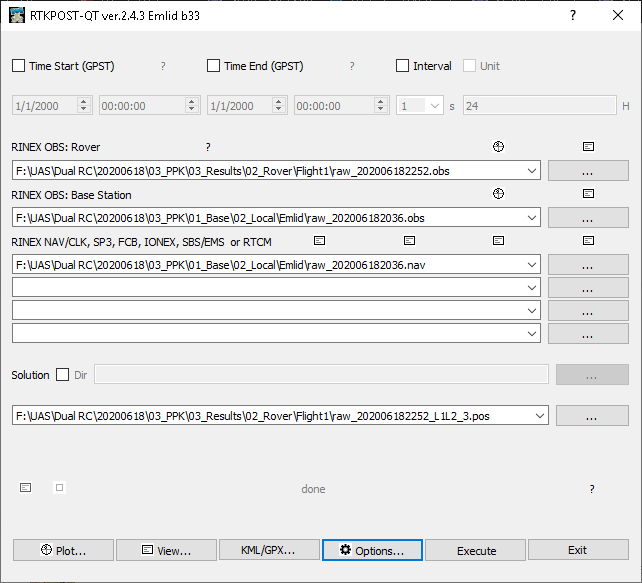
1.Using 1 or 5hz interval will speed up the processing. Especially with flight logs with 10 or 14hz data
This is great when you try to find optimal settings and dont want to spend ages for it to process
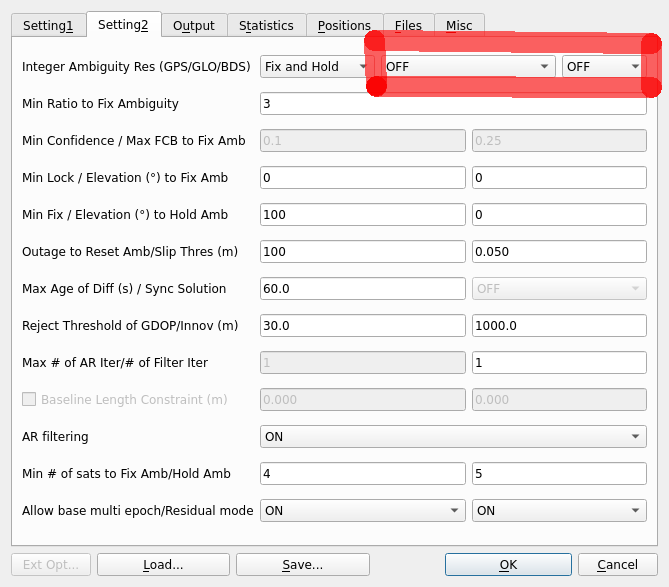
2.Turn off REC dynamic, If helps with FIX solution but should be saved for last and final process. It hugs up a lot of cpu power and processing time. (Turn REC on with dynamic flights and movements)
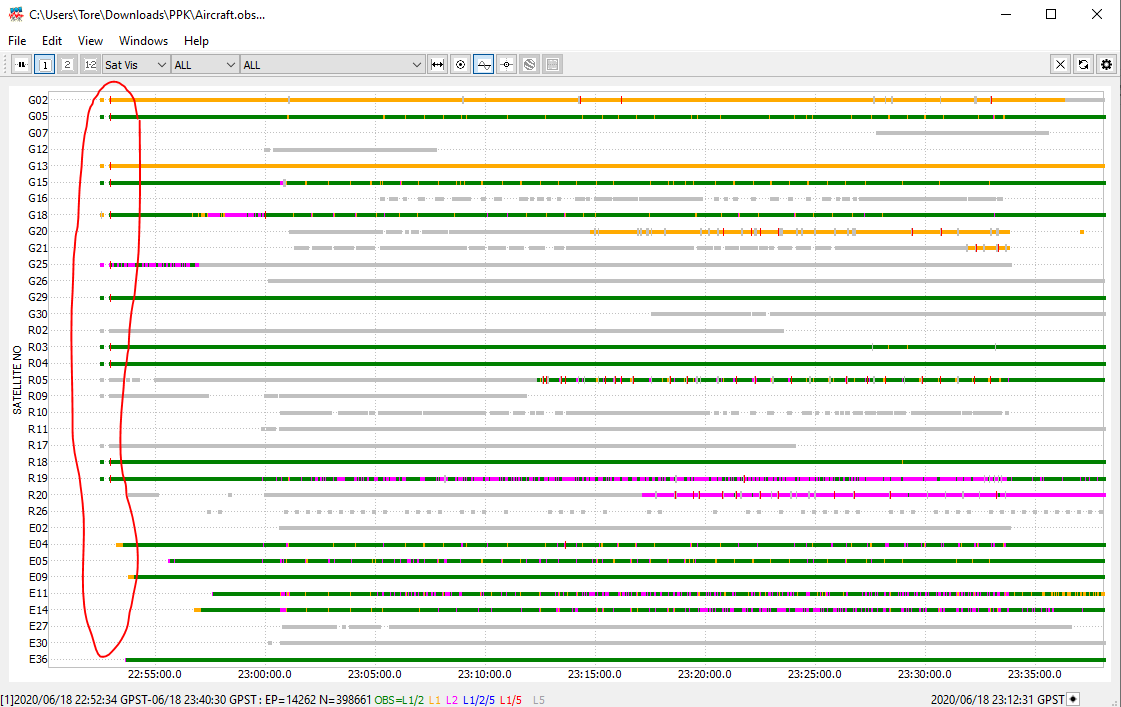
3.Use preview of collected data (that tiny corshair icon at the end og the file path). Sort out bad satellites by exluding them in the process and spot cycle slips you dont want.
Oh and the file i shared wasnt the event file. It was the track plot.
The event file is named xxxx_events.pos
Thank you for the tips. While I understand the gap is not ideal, it was recording in a static position for 5 minutes before taking off, and still many of the events were still a float. I’ll see what this does to the quality of my solution compared to other software options.