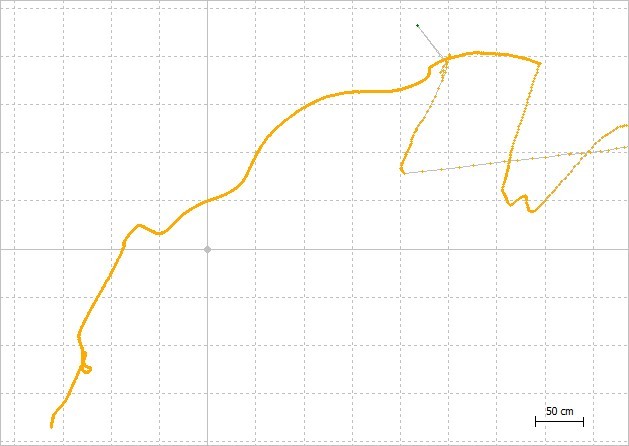
I’ve found an interesting discrepancy between the reach data and the post-processed data and I’m wondering if there’s a particular reason for it.
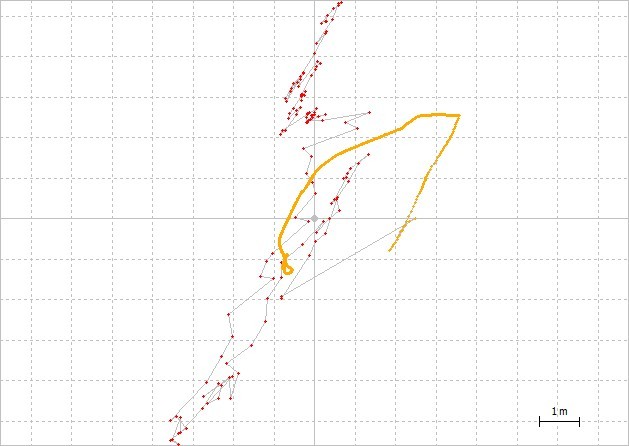
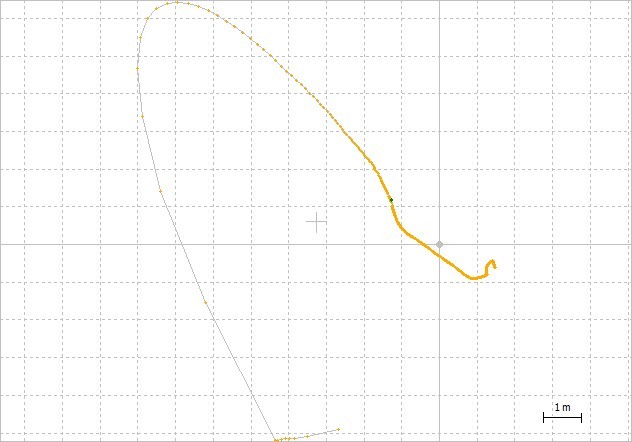
Basically, I’m comparing the post-processed data to the recorded data from the rover, and I’m not seeing them match up very well at all. I made to sure match the parameters between the RTKPost application and the rover settings as closely as possible, but still both tracks don’t really appear to match. I also didn’t have a good fix on any of this data, which is why there’s huge drift for a non-moving rover.
You have some funky values going on here. Are you sure you have your setup correct?, no multipath and interference of some kind? And any minor adjusments displays different plot.
I would try record a better log with better visible satellites.
Do you have a pictures of your setup?
Also use latest RTKlib 2.4.3 b26 GitHub - tomojitakasu/RTKLIB at rtklib_2.4.3
Hmm… That’s just not what I’d expect, minor adjustments shouldn’t radically change a gps plot like that. Regardless they should match the reach’s solution. I’m glad at least it’s not just me seeing that with the data. I can try to record better data but that wasn’t a particularly bad capture. I’m fairly certain I had a large selection of satellites visible with good signal power. I shall try something on the weekend.
I don’t have any good pictures of that location. I was moving around campus attempting to find a good area. There were better results elsewhere. Here’s a picture of my base and rover:
The datasheets don’t recommend one. I’ll have a chat with Tallysman and see what they recommend. I was under the impression these new antennas don’t require one.
I talked to Tallysman about it, they mentioned that it’s not necessary, but it would be beneficial. I made some reflectors up and will hopefully do a couple more tests in a couple days.