



Goodmorning, I have a problem with the positioning of the base in SINGLE mode. On the 2nd and 3th of November I made a surveys in Africa (lat -9.92° long 35.28°), in these survay I use a SINGLE solution to the positioning of the base and I put the GNSS for 30 minutes to define its coordinate before do the flights. Now despite the position of the 2 base is almost the same (difference of maximum 5 m) I have a difference of ellissoidical altitude of 28m. How it is possible?
Hi @martino,
Do you have the raw data logs for those two days? If so, could you please share them with me so I can check? I would also like to check the Full System Report.
You can send the data to us via email at support@emlid.com. Thanks!
Did you single average both days? Or did you document the coordinate from the collection on the 2nd and enter it manually on the 3rd?
Hi,
thanks for the replay. Sorry but with raw data log you say the log data of the base emlid? If yes you can find them at the link below:
best regards
Martino
Thanks for sharing the files! And how do you average the base? Do you usually wait for the receiver to initialize and observe more satellites before averaging it, or do you start averaging it once you turn it on?
Could you please share the Full System Report as well? Thanks!
I usually wait a few minute before average the base. Then I calculate the coordinate of the base for 20/30 minutes when i put it on a unknow point (like in this case).
Where can I find the fully system report?
You can follow this guide to generate the Full System Report. Thanks!
1 Like
Hi Martino,
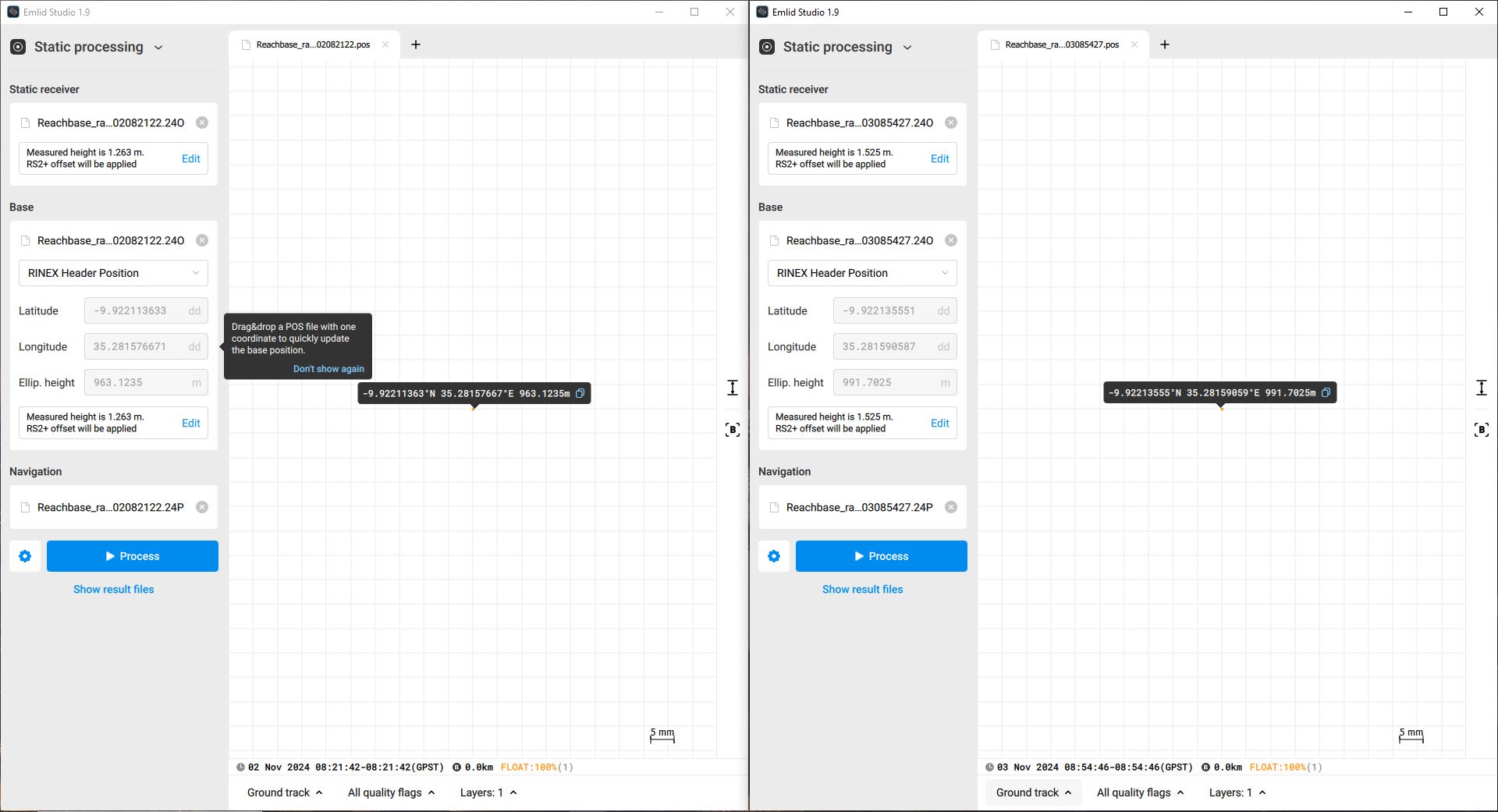
I checked the logs and the Full System Report.
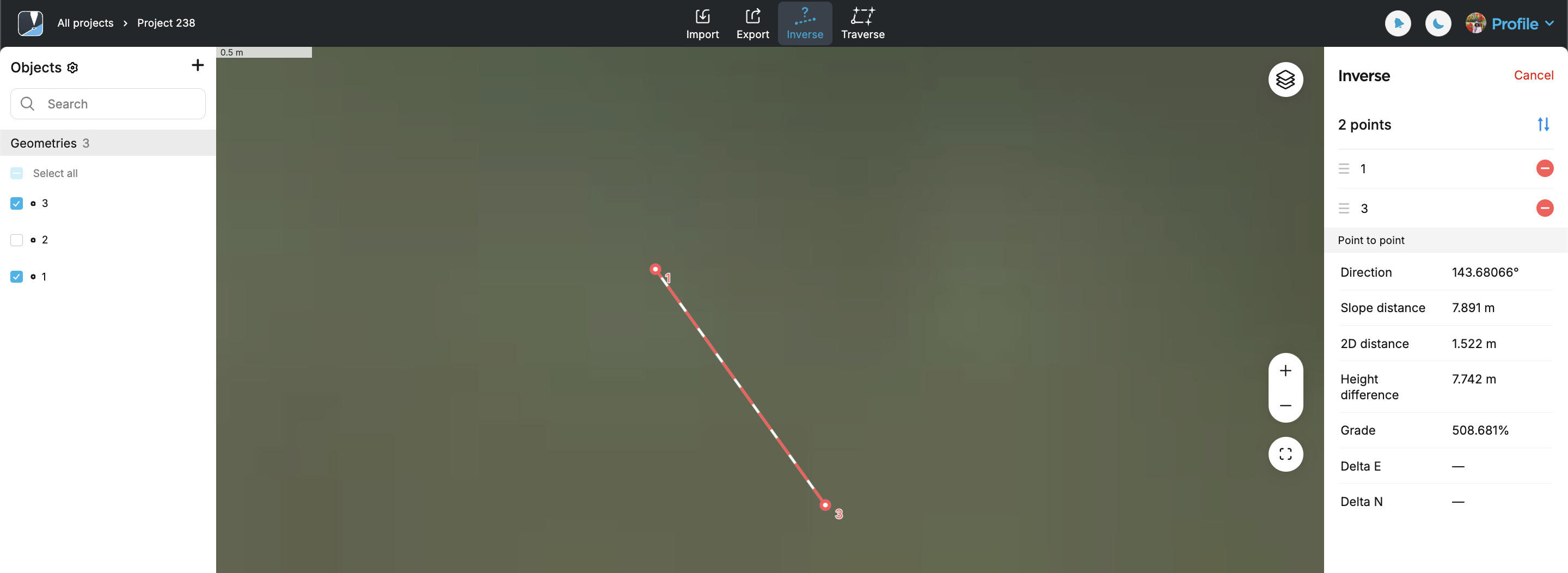
The averaged coordinates between two days (as saved in the Full System Report) differ horizontally and vertically by 7.742m and 1.522m, respectively.
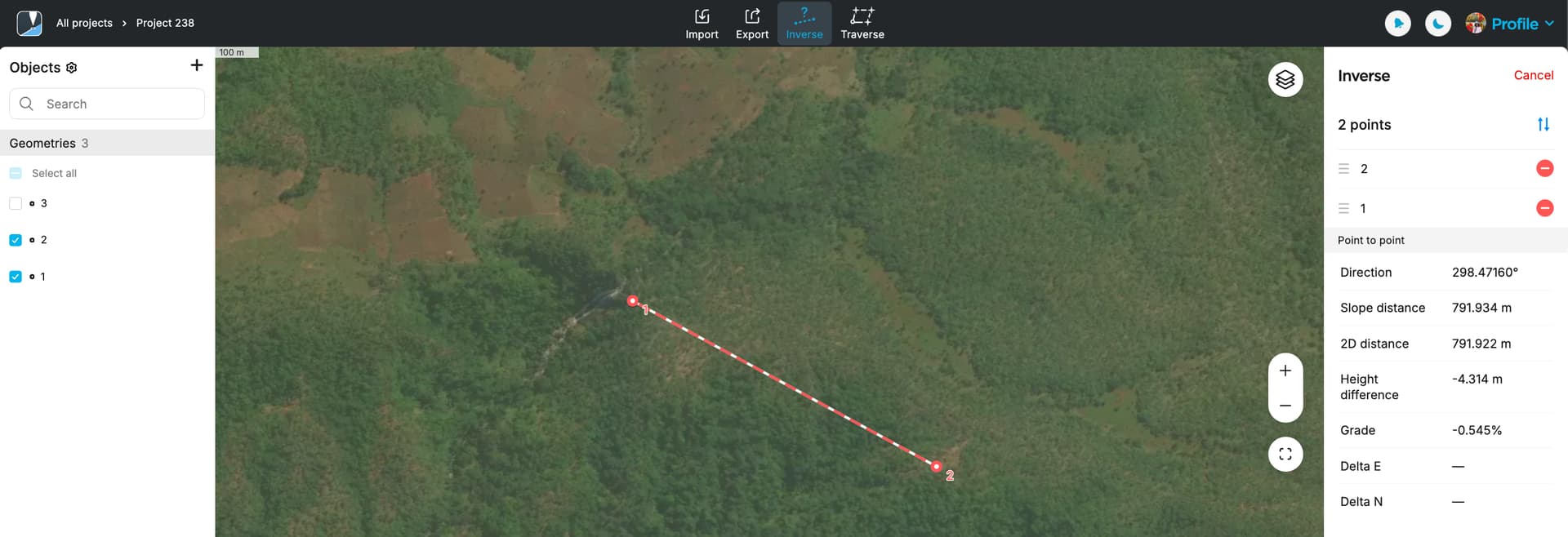
On November 3, the base was initially averaged around 791m away ( with a -4.314m height difference) from where it was averaged the second time.
The receiver was turned off at around 8:34 GPST and turned on again at 08:53, then started averaging again at 08:54:30 GPST. By then, the receiver was still initializing, as at 08:54:48, RS2+ had just used nine satellites for computation.
Still, the difference between the positions (November 2 vs November 3, 2nd averaging) is within tolerance.
Could you please confirm the date when you saw a 28m difference in height?
So, the correct position of the base is the position of November 2?
So the next time I have to wait more minute until average the base from the moment that i tun on it? So the problem is that there were only 9 satellites?
I saw the difference of 28m from this analysis on emlid studio but maybe it isn’t the correct way to see this thing
I’m sorry for the confusion. I was just pointing out that even if the receiver started averaging when there were not yet enough satellites, the averaged coordinates are within the tolerance.
Also, could you please tell me more about the screenshot in Emlid Studio? Did you process the data using the same observation file for the base and the rover to check the coordinates? When processing data in PPK, you need to have a separate GNSS receiver that will provide corrections to your RS2+.
In your case, it’s correcting its own.
1 Like
I also want to point out that the averaged coordinates in Flow are different from the coordinates in the RINEX header. These averaged coordinates are not saved in the RINEX header.
You’ve averaged the base long enough, and the difference between the coordinates from November 2 and 3 is just 7.742m and 1.522m in horizontal and vertical.
This kind of difference is expected when you average it in Single.
1 Like
Ok now I understand! Thanks. So, in this situation the correct way to marge 2 survey is take a point on the ground with a marker and the day after put the base on this point and give at the base the coordinate take by the rover the day before. Correct?
2 Likes
Yes, indeed.
Set up the base over a point and mark it on the ground. Copy the coordinates you got from averaging and use the same point and coordinates when you conduct the survey the following day. ![]()
1 Like
But in SINGLE I can’t have precision biggest than a few meters?
SINGLE mode is only accurate to about about a meter at most.
You need to log the raw data if your first measurement, post process against a known point also logging data and the you’ll have roughly cm accuracy. Use the computed point as your main reference as base if you are using a rover.
Of course all this depends on occupation times of your receiver and the actual baseline to the reference point logging data. Longer occupation times equal better precision especially if you have long baselines to post process.
If you don’t have a reference point to post process against, you can log a minimum of 4 hours for your point for PPP using online services to compute the final coordinates of your point.
1 Like
Yes, as @EBE111057 has mentioned, with the Average Single base position, you’ll obtain only relative accuracy. It means that the rover positions will be accurate to each other but not to global coordinates.
To tie your results to global coordinates, you’ll need to use an accurate base position. There are 2 ways to do it:
- Connect the base to a local NTRIP service and average its position with a Fix solution.
- Enter the accurate base coordinates manually. If you don’t have a known point nearby, you can find Reach RS2+ coordinates with the PPP technique.
This topic was automatically closed 99 days after the last reply. New replies are no longer allowed.