



What is the difference between position streaming TCP Server - TCP Client mode? Successfully used TCP Server mode, but failed to connect to Surpad software in Reach TCP Client mode.
2 Likes
Hi @lipisoftware,
To stream the Reach M2 position to Surpad via TCP connection, you need to configure settings both in Emlid Flow and SurPad.
Configuring settings for the rover in Emlid Flow
- Open Emlid Flow and connect to your Reach.
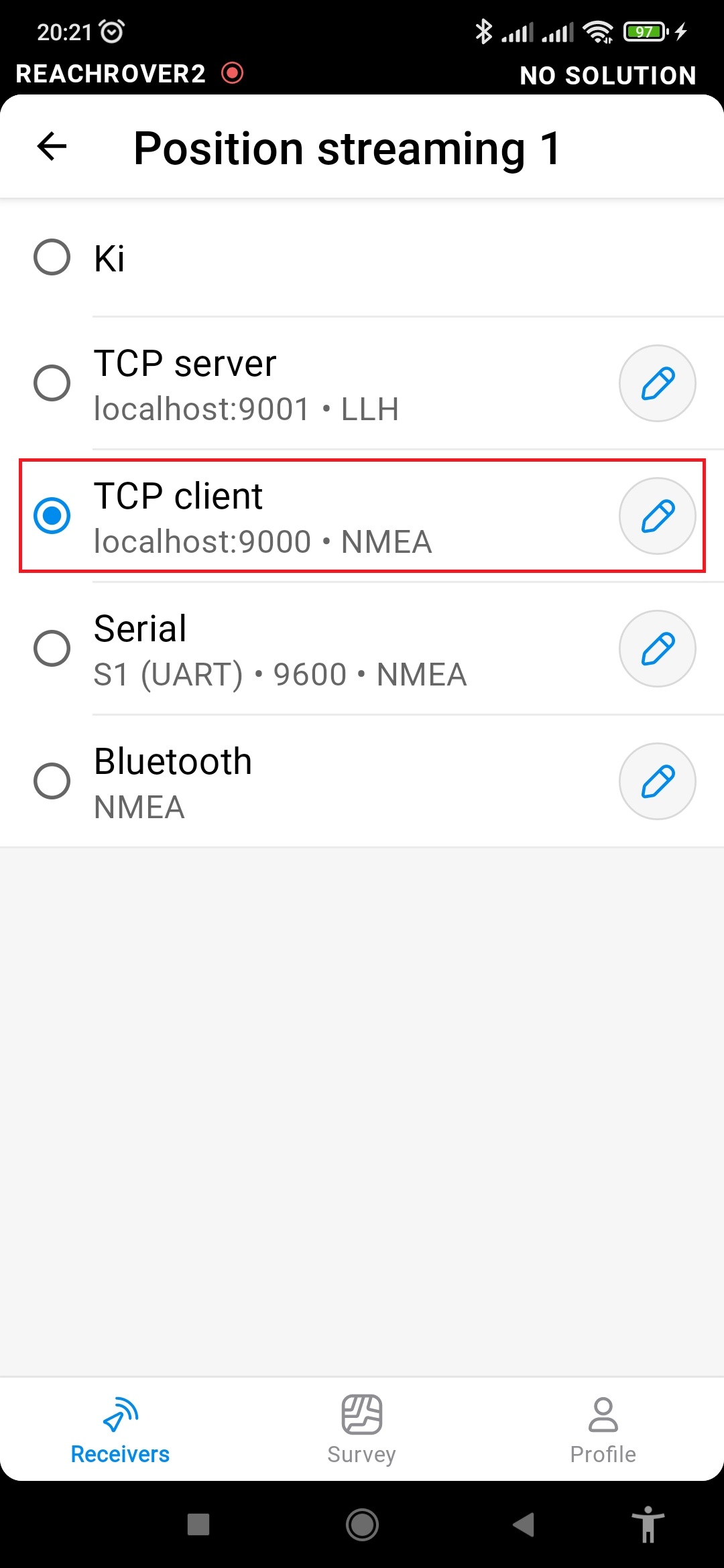
- Go to Settings and tap Position Streaming 1.
- Choose TCP server.
- Tap the Edit button in the TCP server cell.
- Tap Format and choose NMEA. Save changes.
By default, the receiver will be configured on the TCP port 9001
Configuring settings in SurPad to receive position from the Reach device
We don’t have access to SurPad, but these settings should be chosen.
- Communication Mode: TCP Client
- IP: IP address of Reach receiver that you can see in the Emlid Flow app while connecting
- Port: Should be the same port as in Emlid Flow.
You don’t need to set it up. The Reach device is the “server” that sends its current position to the software, the “client”. You need to set the TCP client settings in your software, Surpad.
Can you tell me at which step you are having issues?
Hi Ruth!
Reach Position streaming/TCP server mode works perfectly with Surpad software.
My question concerns Reach Position streaming/TCP client mode.
1 Like
Could you please explain your setup? A TCP client is not required in this setup. Unless you mean that you have a 3rd party receiver that sends corrections to your Reach M2 via TCP.
In this case, you need to set the M2 as a TCP client under Correction Input.
Hi Ruth!
What is this option for? How to use it?
Hi @lipisoftware,
In this setup, Reach is still streaming its position, it’s just that the roles are reversed. This is where Reach initiates a connection request to a TCP server to establish a connection to the server.
An example of this is fleet tracking, where the truck - the client - would stream its position to the main station, the server.
2 Likes
This topic was automatically closed 100 days after the last reply. New replies are no longer allowed.